
Quadroin AUV
Quadroin - an autonomous underwater vehicle (AUV)
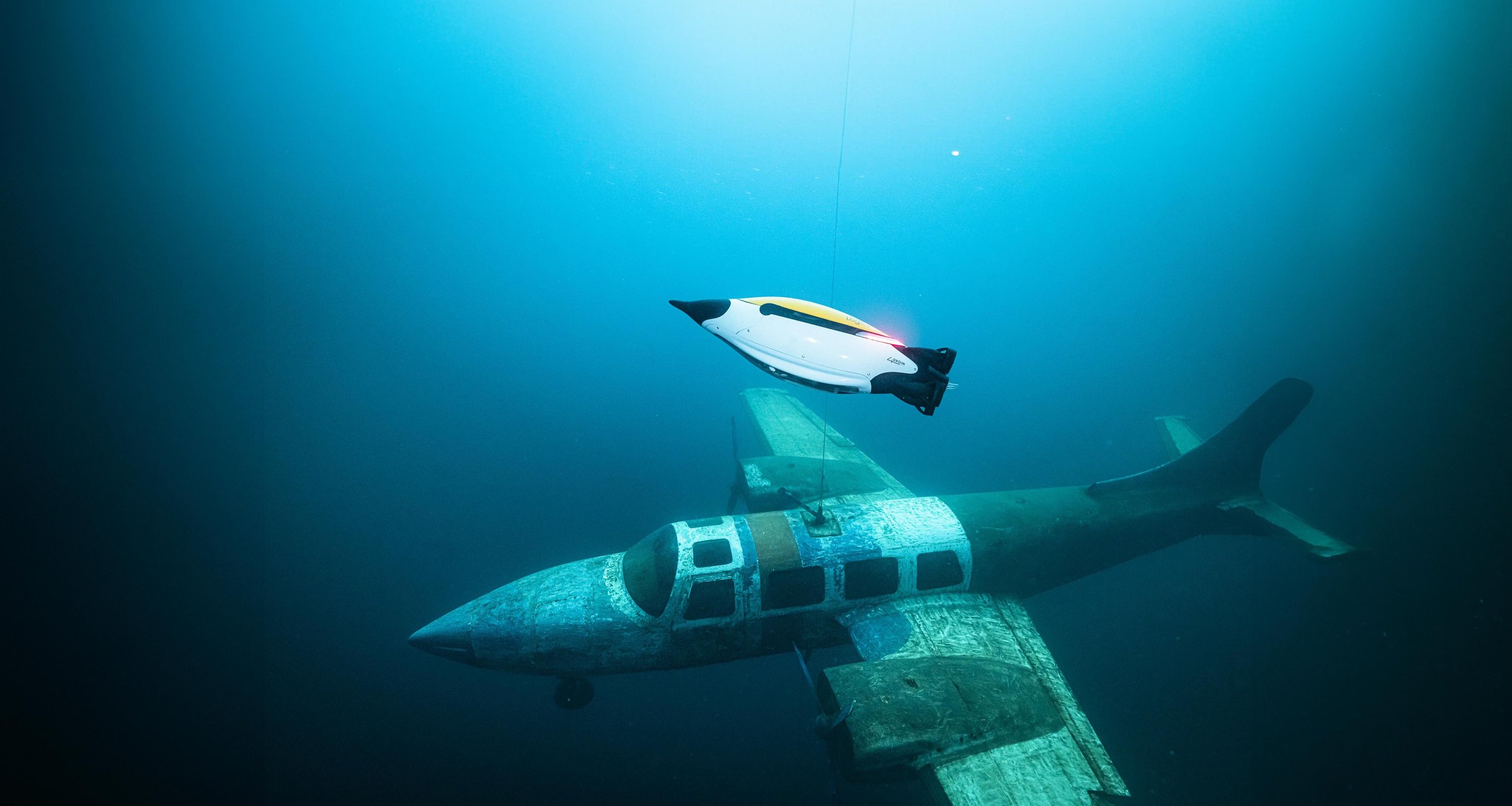
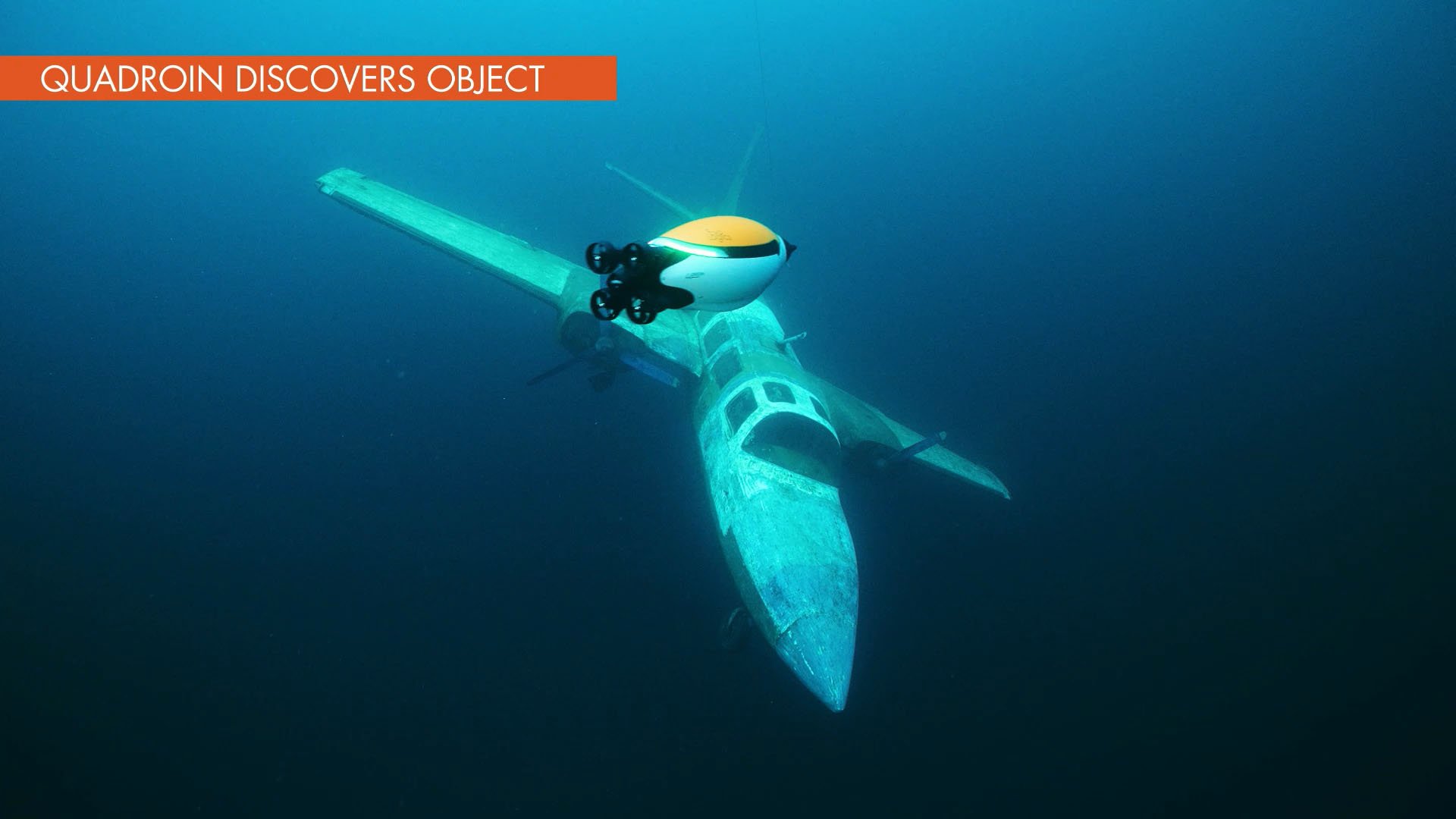
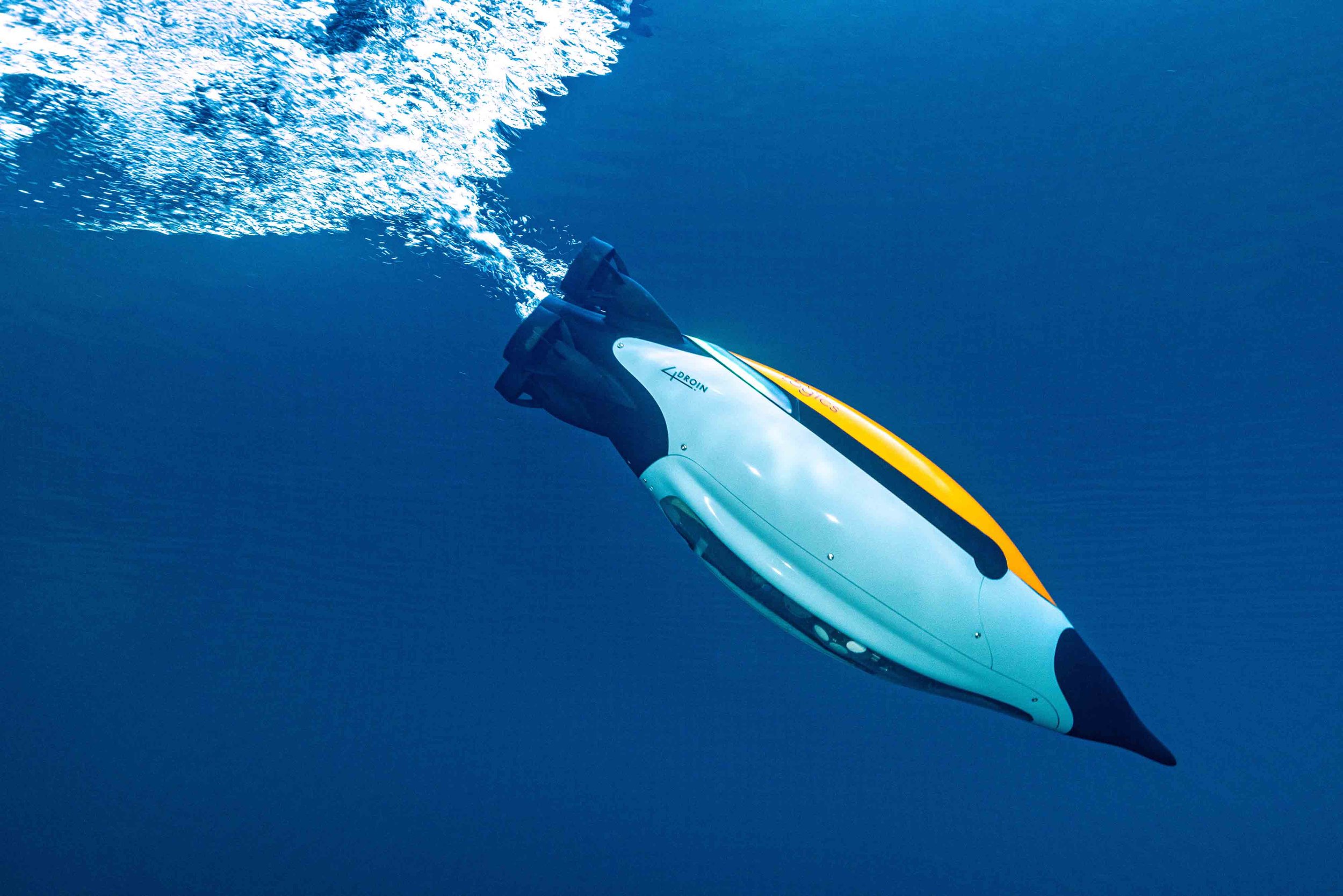
The EvoLogics Quadroin is an autonomous underwater vehicle (AUV) designed for high-resolution side-scan sonar and camera surveys.
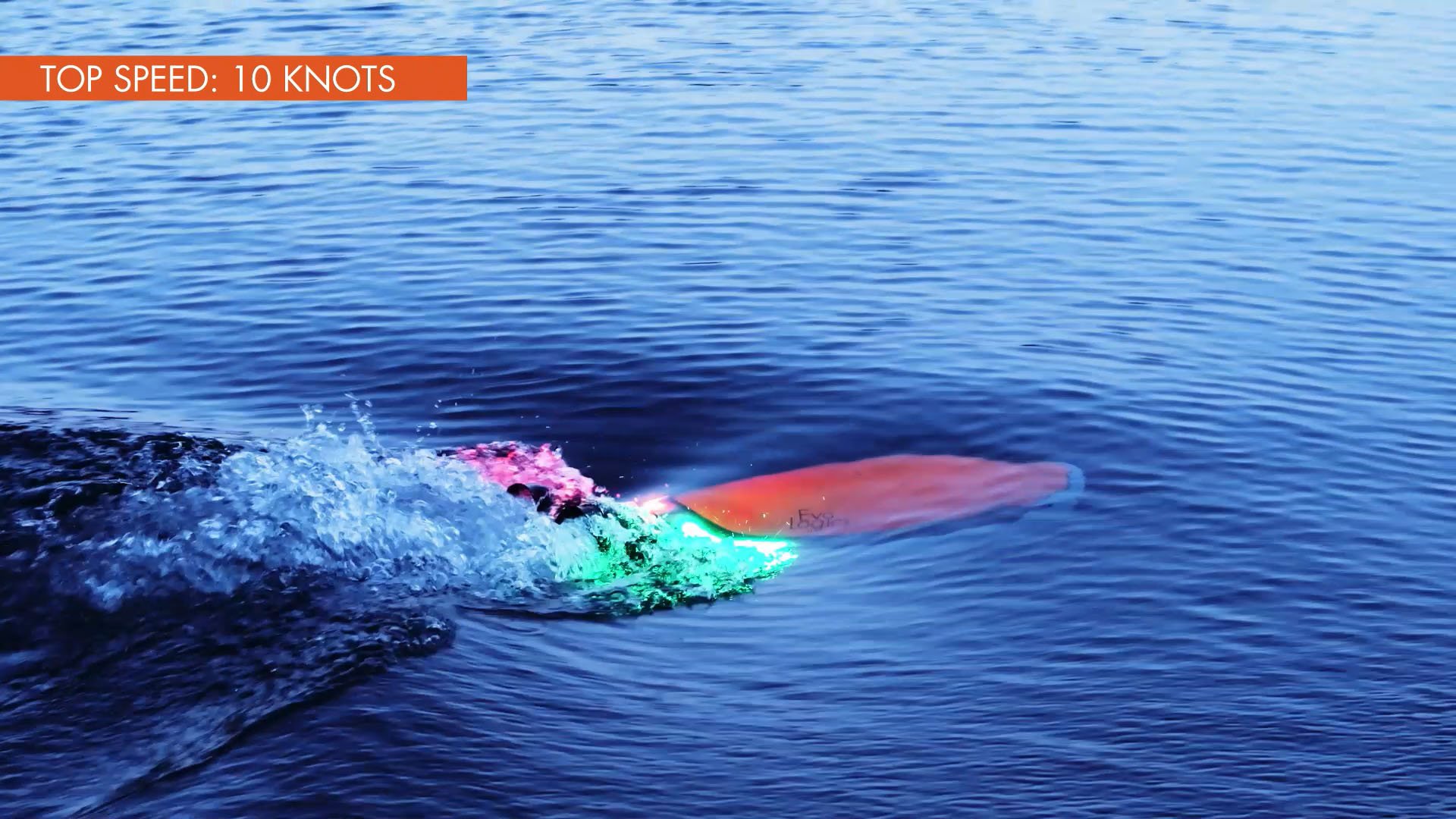
Its bionic, penguin-inspired hull combines hydrodynamic efficiency with high maneuverability, allowing speeds of up to 10 knots while maintaining low energy consumption for extended subsea operations.
The Quadroin autonomously executes pre-programmed missions, collecting data along its waypoint grid. It is equipped with a side-scan sonar, a downward-looking full-HD camera, and an AI-based object recognition module for detailed visual documentation and detection of submerged assets.
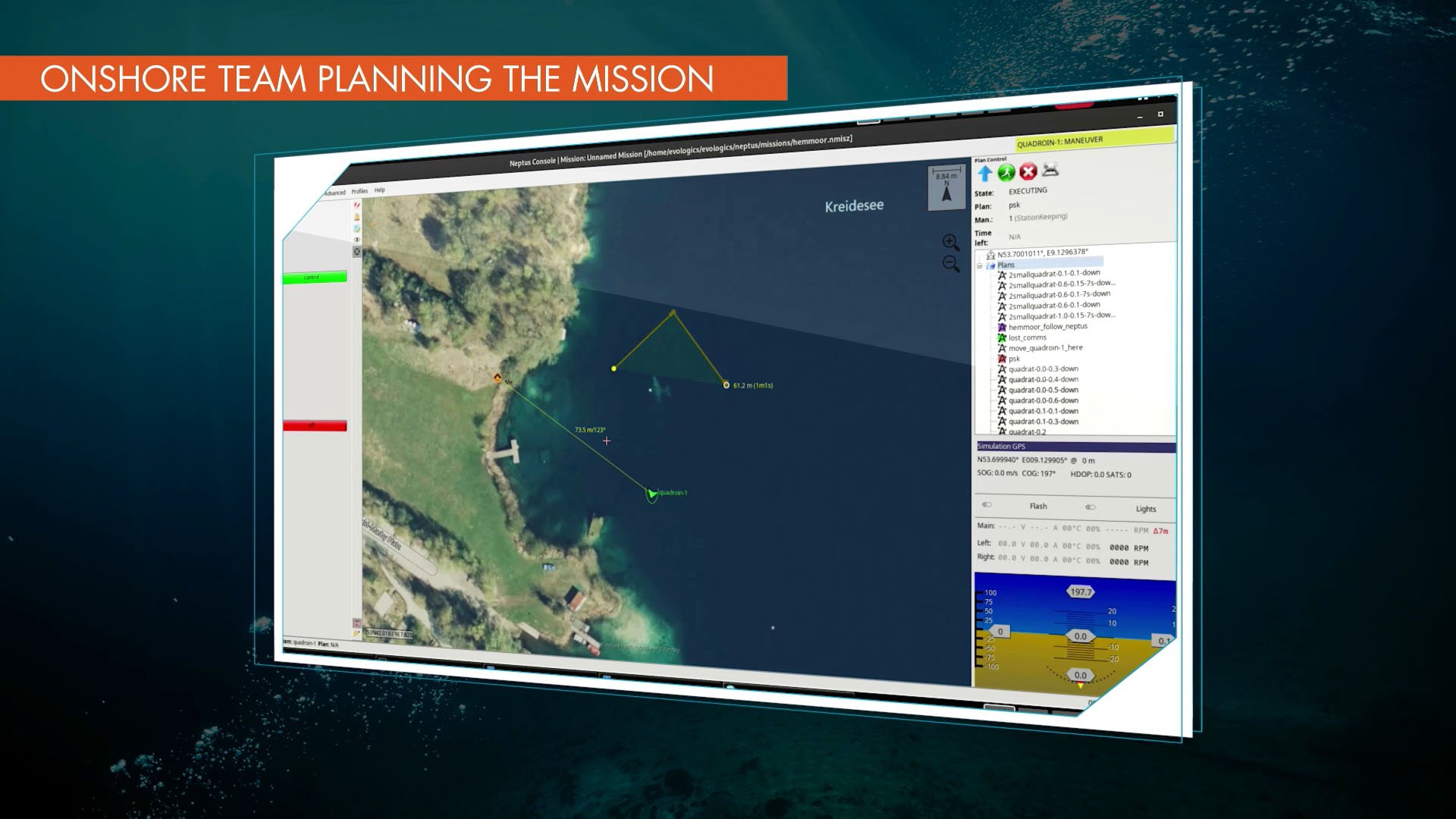
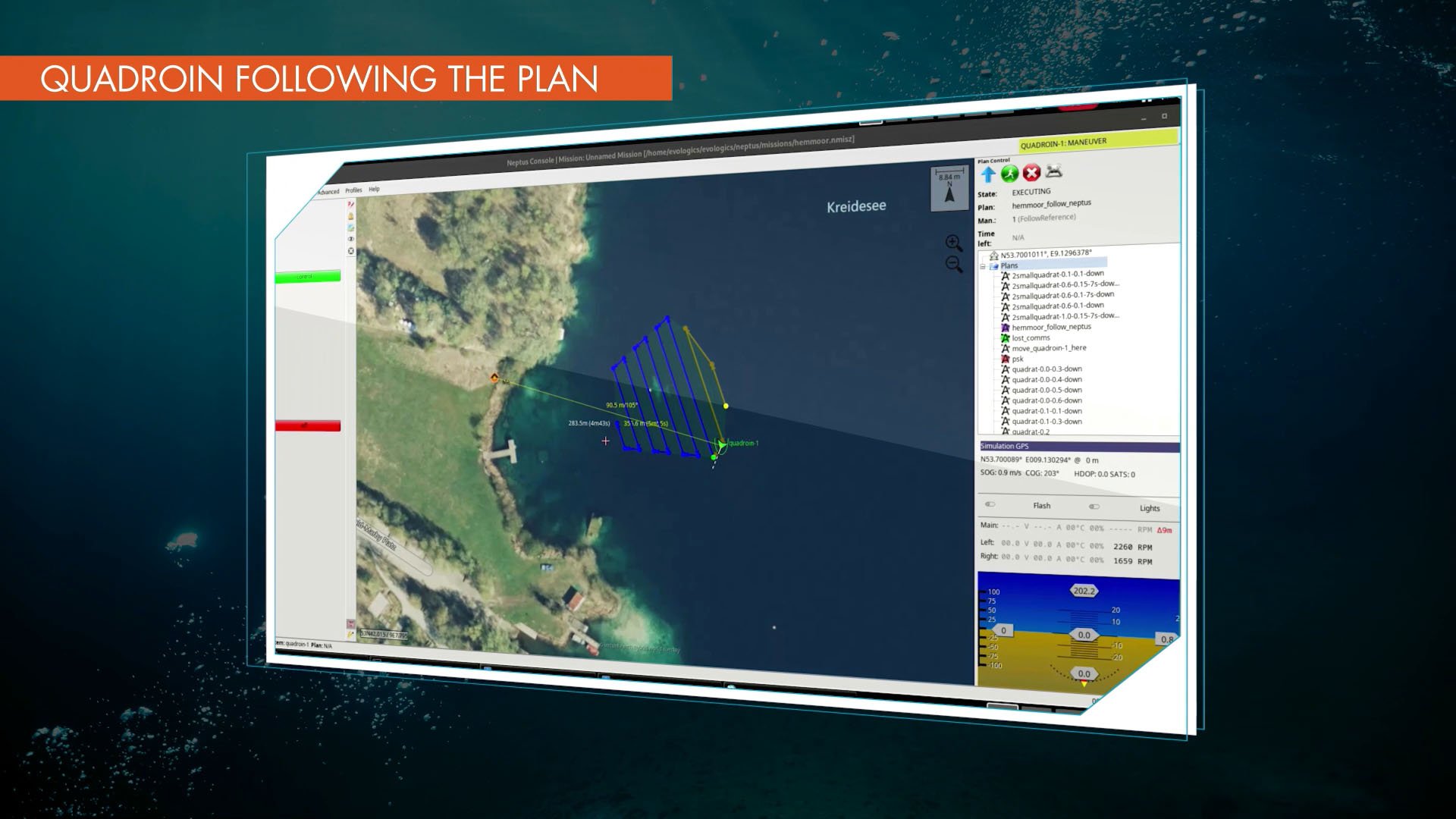
A network of surface gateways enables precise navigation and seamless mission awareness - with live trajectory and status updates wirelessly available to the operator onshore.
Compact and easy to handle, the Quadroin streamlines operations, reduces deployment time, and provides a professional platform for underwater data collection – equally effective as a standalone tool or as part of a coordinated multi-vehicle network.
Key Features - Quadroin AUV

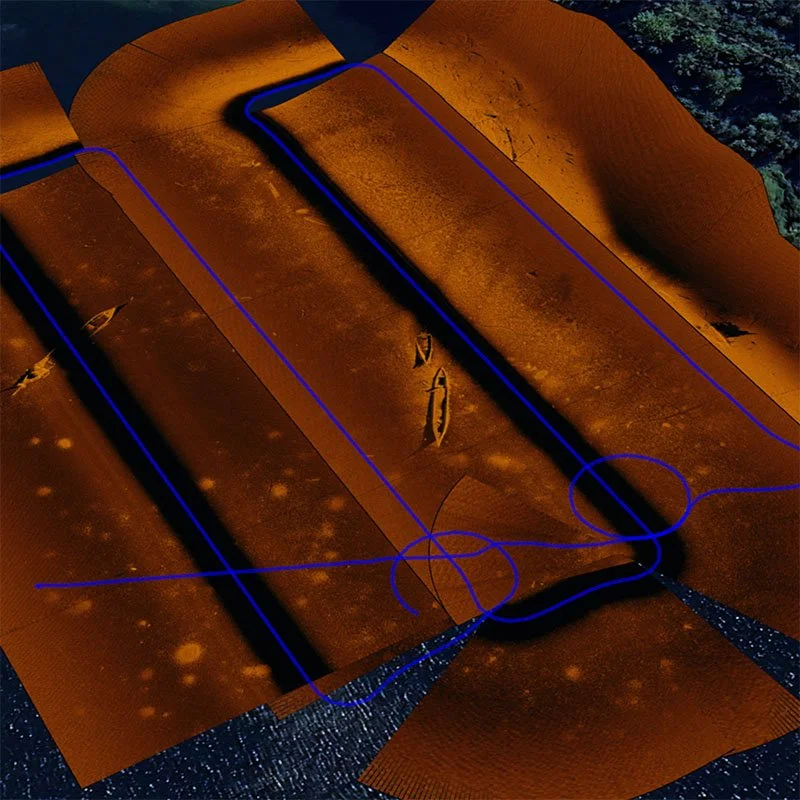
High-precision surveying. The Quadroin is equipped with a side-scan sonar and a downward-looking full-HD camera, combined with AI-based object recognition for detailed subsea imaging and detection of assets in side-scan and video feeds. To collect data, the vehicle runs a supervised survey mode along a pre-programmed grid covering the area to be surveyed.

Mission Awareness and Control. The vehicle remains connected – both above and beneath the surface, providing operators with comprehensive awareness and control through all stages of the mission. Before the dive, the vehicle’s collapsible multi-antenna receives GNSS fixes and establishes wireless links to the control station. The mission is executed as a continuous data stream via a satellite connection or a USV or a USBL-equipped vessel – providing GNSS locks with acoustic positioning fixes and relays the vehicle status to shore. Through the acoustic link, operators can adjust waypoints, upload modified mission parameters, interrupt or abort the mission, and initiate automated recovery procedures. After surfacing, all collected data is available for wireless download and post-mission analysis.

Advanced navigation with live status updates. Carrying an acoustic modem, the vehicle combines inertial dead-reckoning navigation with intermittent USBL/LBL positioning fixes for periodical GNSS lock from surface gateways. During the mission, trajectory and status updates are available at the operator’s station through a wireless link to the gateway.
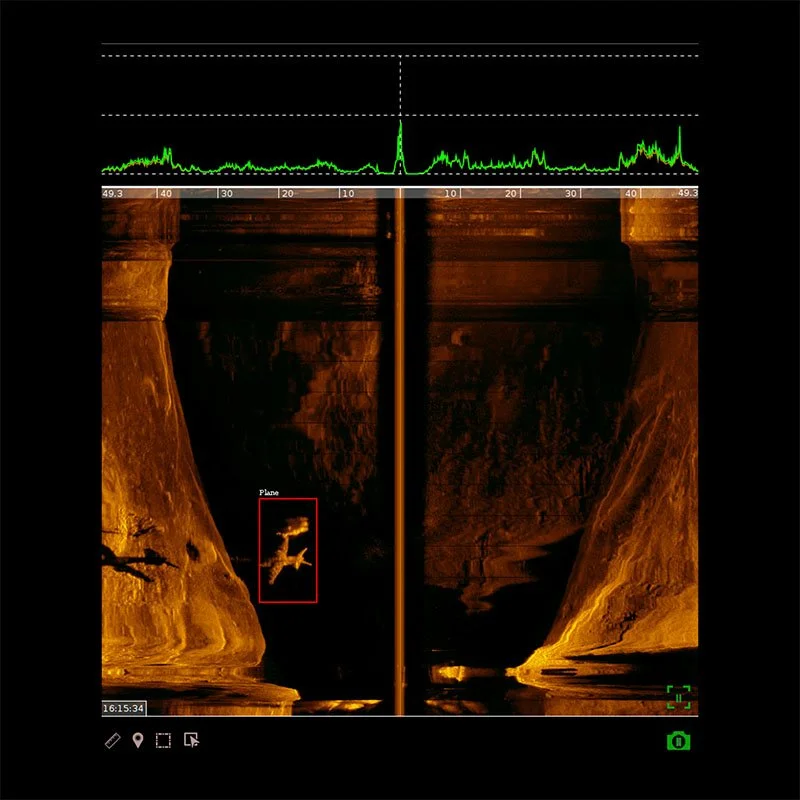
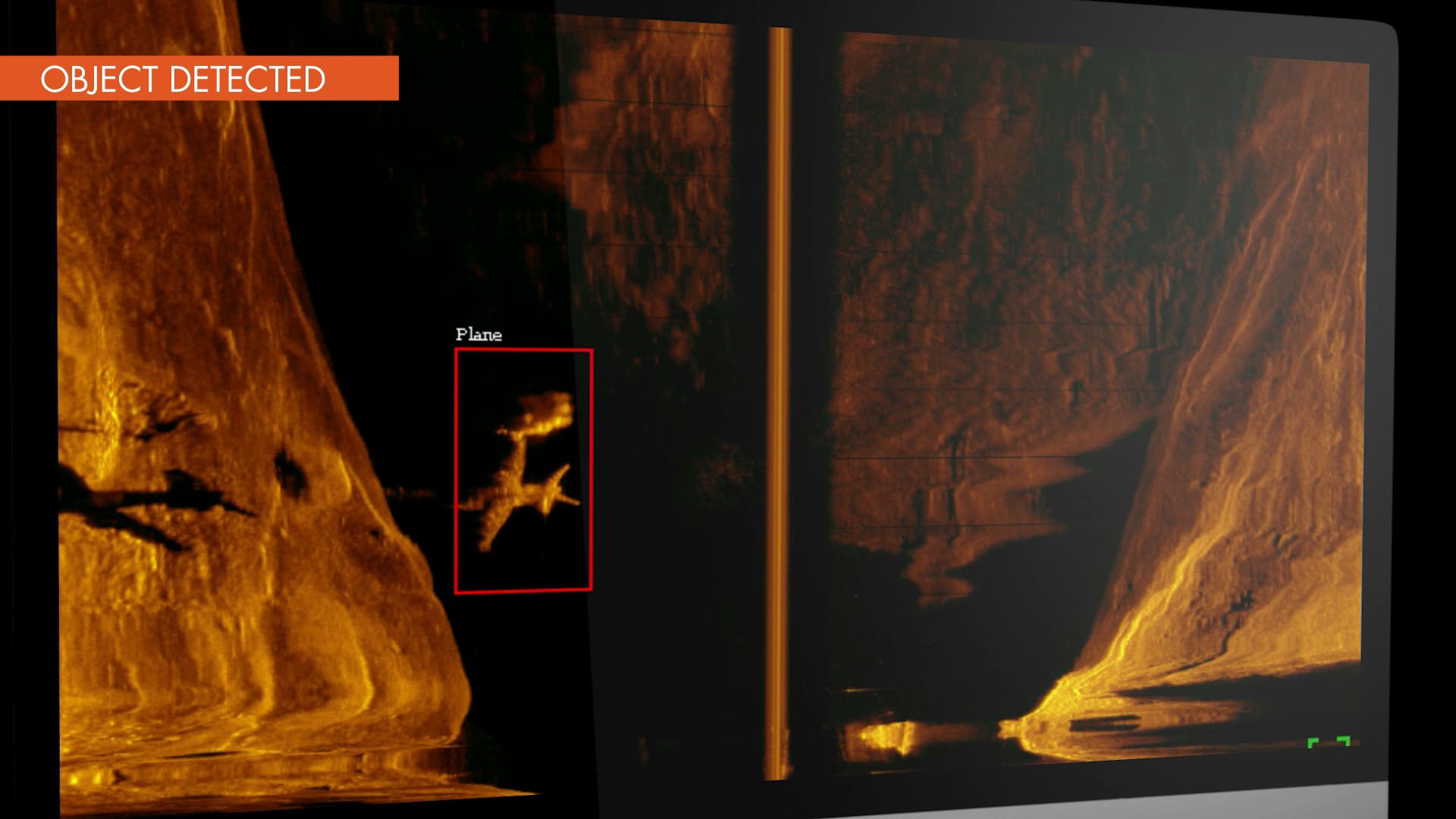
AI-powered onboard processing Runs directly on the vehicle, analyzing side-scan sonar and video camera feeds to detect various object classes in real time during the mission. Through the acoustic link, detection type and location are transmitted to the control station for immediate evaluation, with all detections included in the full dataset for detailed post-mission analysis.
Cooperative multi-vehicle networks. The Quadron can be configured to operate as part of joint multi-vehicle missions – coordinated. Quadrons AUVs, Sonobot USVs, and EvoLogics Diver Navigation System units networked with surface gateways into a hybrid robot/diver taskforce. With Quadron’s updates on detected objects, divers can be directed towards the discoveries for on-site assessment, enabling efficient, time-saving inspections.
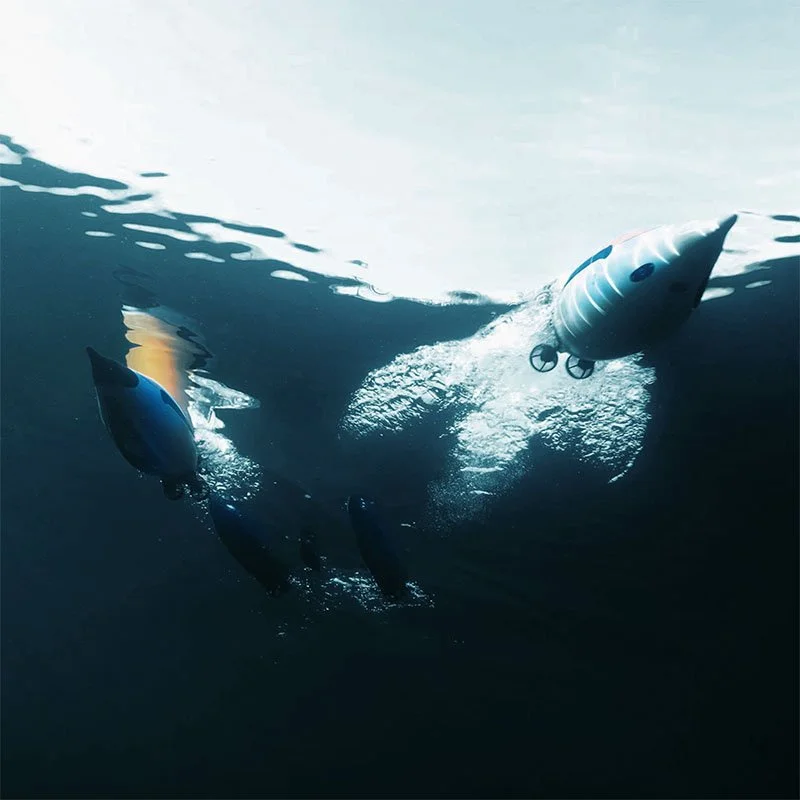
High-speed performance and efficient operation. The Quadron’s penguin-inspired spindle-shaped hull minimizes drag and maximizes efficiency. The vehicle reaches speeds of up to 10 knots while maintaining exceptional maneuverability and low energy consumption, making the AUV suitable for both survey missions and data-intensive deployments.

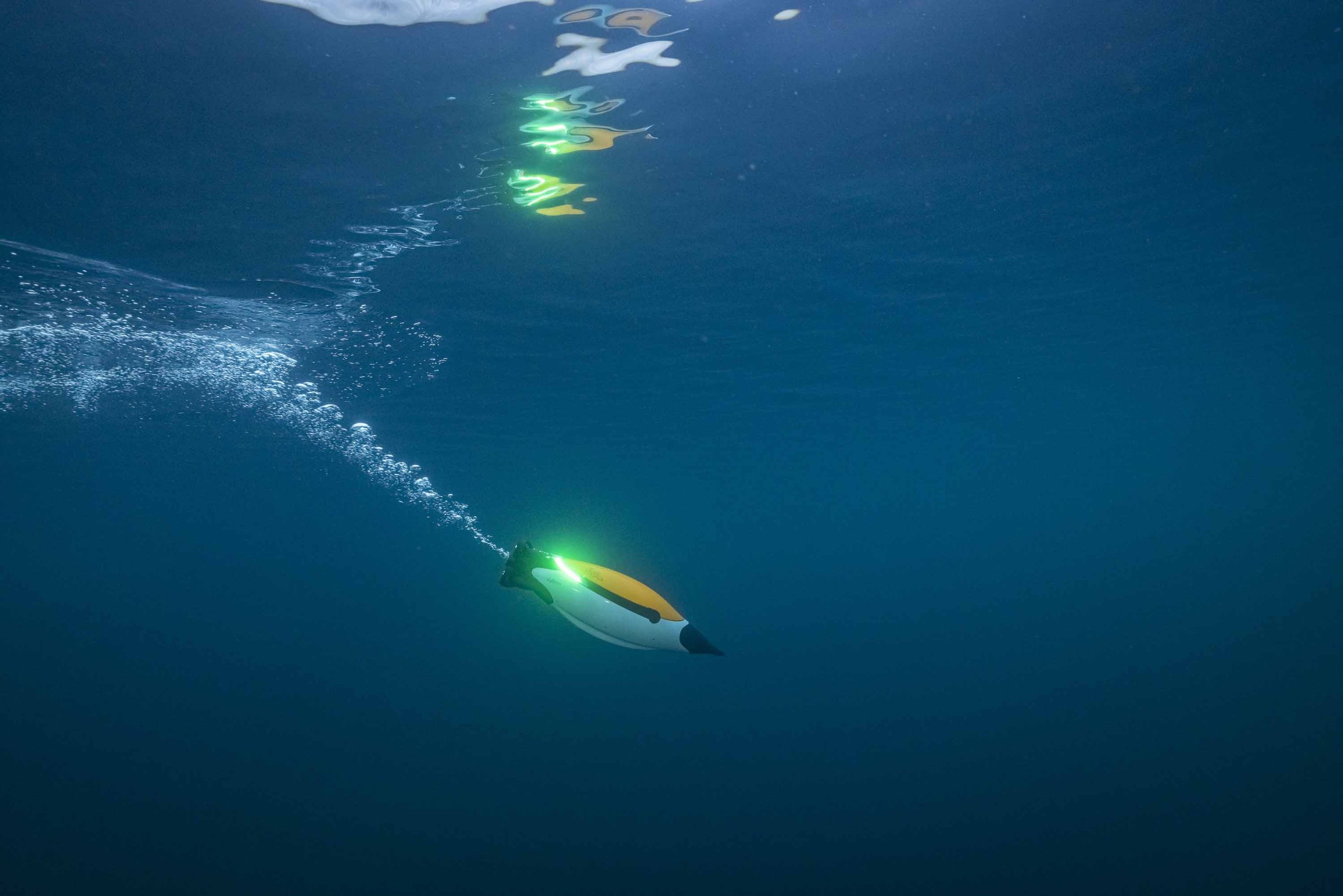
Easy to handle, easy to find. Lightweight and compact, the Quadron can be carried by a single person, transported in a car trunk, and launched quickly in the field – from vessels or platforms of any size. Before or after the mission, the vehicle can be manually steered with a remote control to reach the start or recovery point. Once resurfaced, the AUV is clearly visible over water thanks to bright LEDs and flashing lights, so its recovery is straightforward.

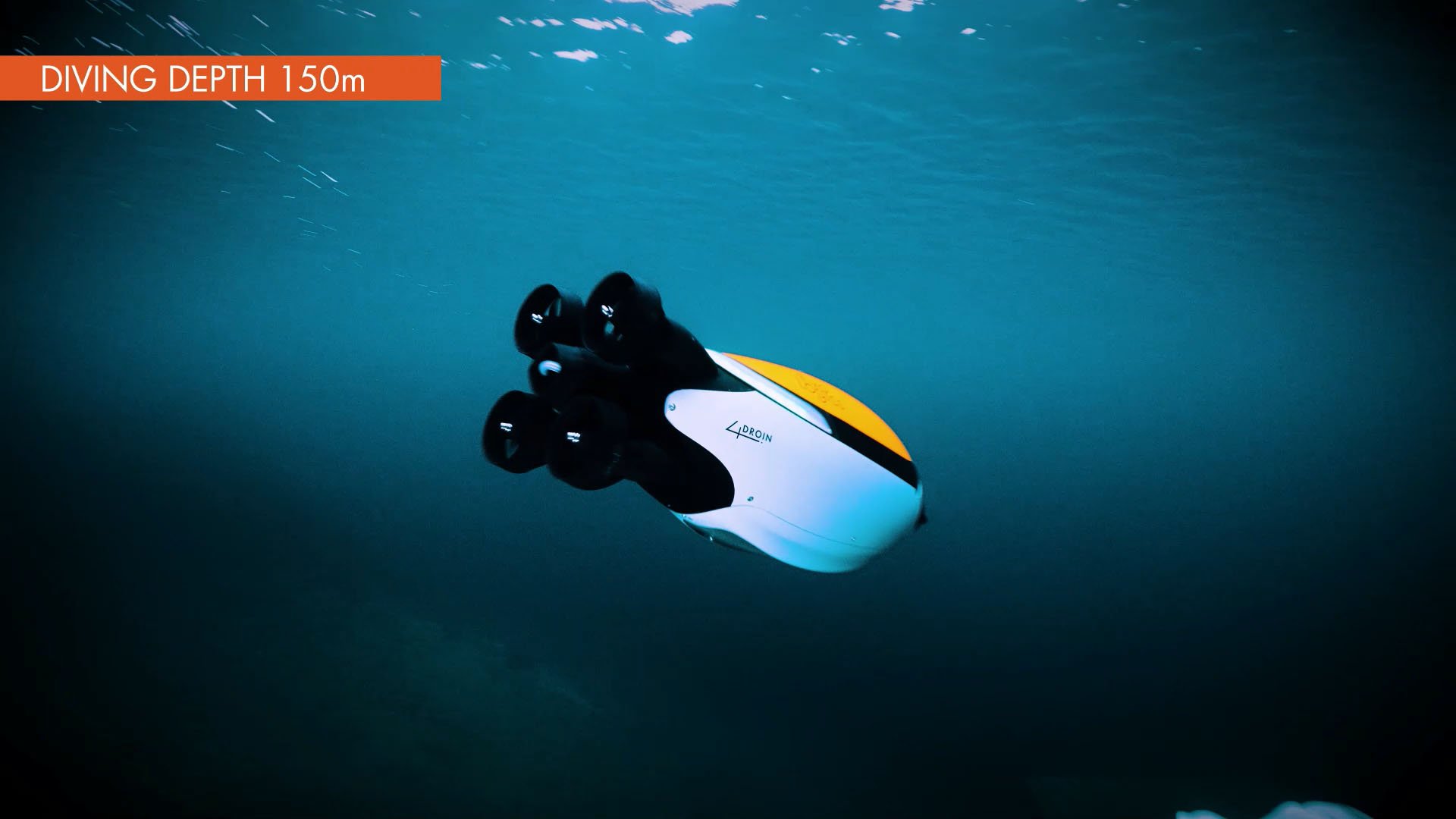
Operating Depth 150m. Speed up to 10 knots
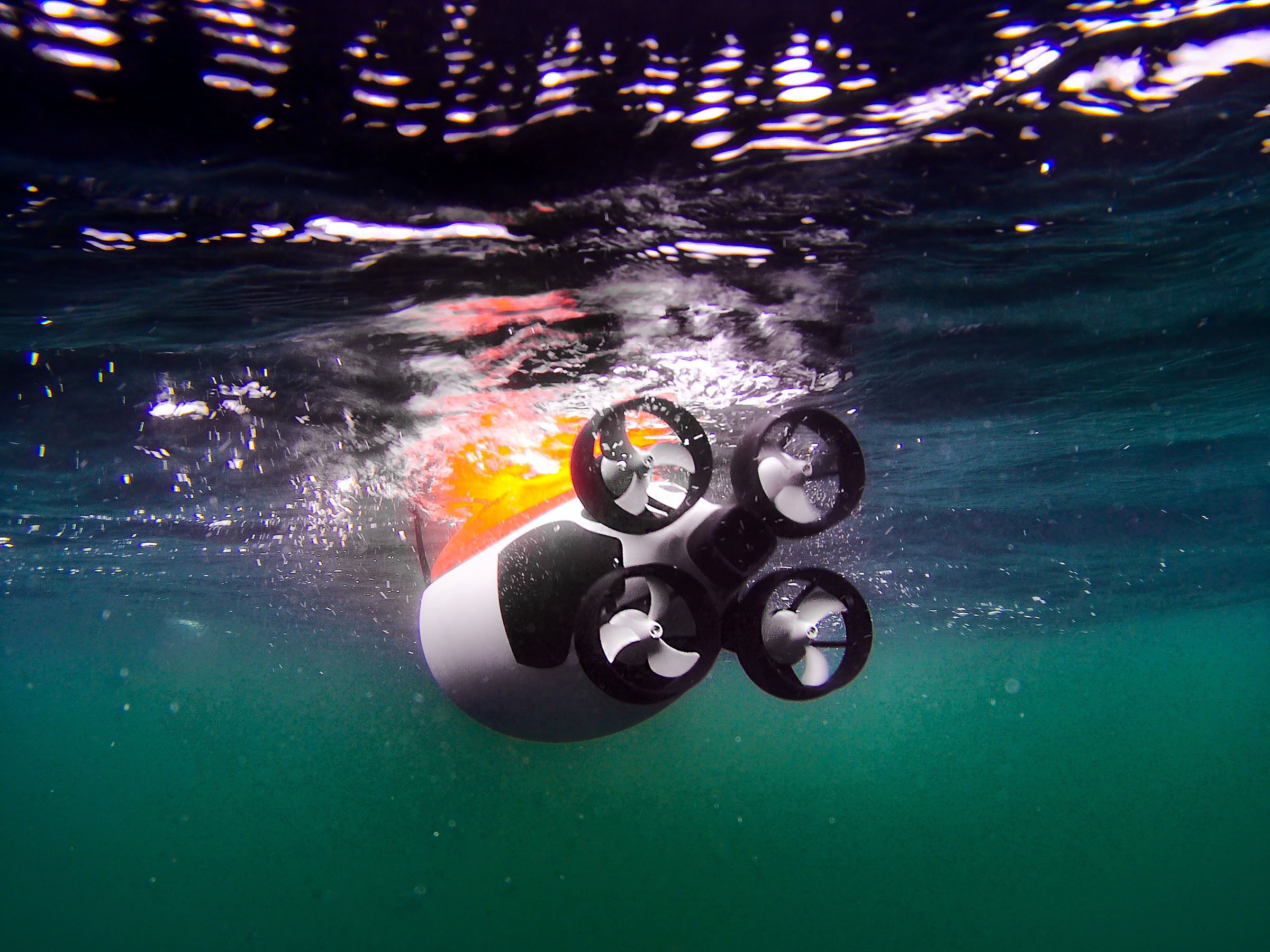
Four powerful thrusters, 10 kn max. speed

Compact and easy to handle, the Quadroin streamlines operations, reduces deployment time, and provides a professional platform for underwater data collection.

Vehicle payload The Quadroin platform is equipped with an integrated payload including sonar and imaging systems, acoustic and radio communication units, GNSS antennas, as well as onboard AI to detect subsea objects and ensure effective, collision-free autonomous operation.
Vehicle payload
The Quadroin platform is equipped with an integrated payload including sonar and imaging systems, acoustic and radio communication units, GNSS antenna, as well as onboard AI to detect subsea objects and ensure effective, collision-free autonomous operation.
-
Side-Scan Sonar
Generates detailed images of the seabed and underwater infrastructure.Forward-Looking Sonar
Supports the onboard collision-avoidance system for safe navigation.
-
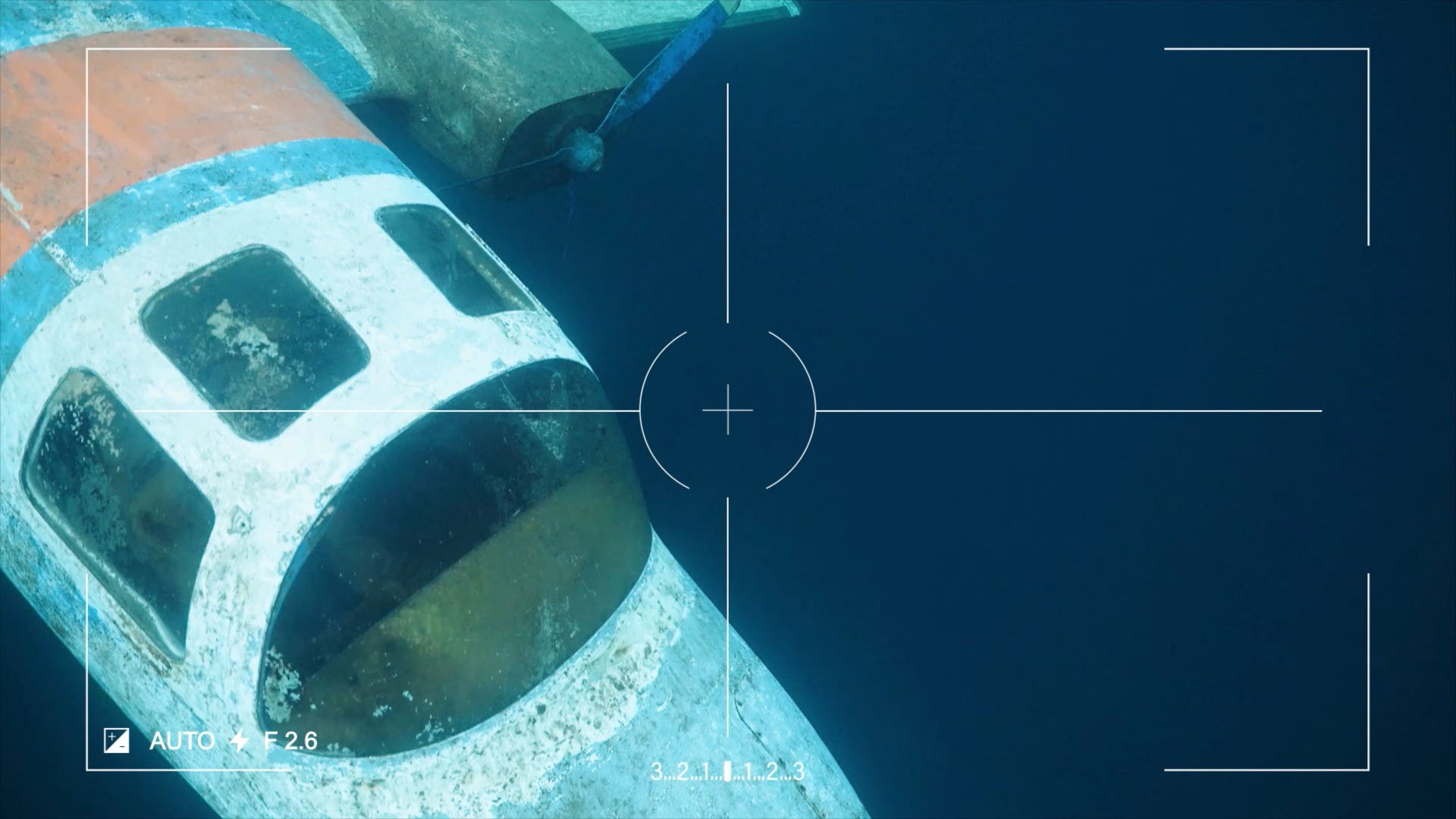
Underwater Full-HD camera
Supports visual documentation of the seabed and subsea assets.
-
Object Recognition Module
Runs directly onboard the vehicle, analyzing sonar and video feeds to detect and highlight objects during post-mission review.Obstacle Avoidance System
Uses sonar data and AI processing to prevent collisions during autonomous missions.
-
Optional ADCP
Acoustic Doppler Current ProfilerCTD (Conductivity, Temperature, and Depth)
Sensors can expand the environmental monitoring capabilities of the vehicle
-
GNSS positioning
An integrated GNSS receiver provides positioning fixes at the surface with a pop-up multi-antenna that automatically collapses for the dive.Inertial navigation
A single unit sensor combines DVL and AHRS / INS for dead-reckoning subsea navigation, enhanced with periodical GNSS fixes from the USBL/LBL acoustic positioning system.
-
Underwater Acoustic Modem
Links the vehicle with the surface gateway during the mission, enabling status updates and acoustic positioning that enhances inertial navigation with GNSS corrections.
-
The pop-up multi-antenna for GNSS positioning and over-air communication automatically retracts before the dive and stays flush with the vehicle body, maintaining a streamlined hydrodynamic profile throughout the mission.
WiFi or Long-range radio
At the surface, a WiFi or long-range radio access point connects the vehicle with the shore station - enabling vehicle configuration, mission uploads, and data download after recovery.Cellular LTE
An optional LTE add-on extends communication beyond line-of-sight for increased operational flexibility.
-
The Quadroin’s control software supports the entire mission cycle: interactive, geo-referenced planning of the survey grid; monitoring and control of the mission during deployment; and post-mission download of the full dataset for detailed analysis and multi-format export.tem description

Surface Gateway Options
The gateway serves as a central surface node, enabling acoustic positioning and communication with the Quadroin throughout the mission. It exchanges acoustic signals with the vehicle, computes its georeferenced position fixes, and transmits them back to enhance the Quadroin’s inertial navigation with intermittent GNSS corrections. Through WiFi or long-range radio links, the gateway relays position data and status updates from the Quadroin to the control station - ensuring consistent mission awareness.
Depending on operational needs, the gateway can be deployed as a stationary or mobile surface node - or as a hybrid network to cover extensive survey areas.
-
EvoLogics USBL Buoy is a compact, self-contained unit with USBL transceiver, dual GNSS, onboard PC, wireless access point and rechargeable battery, designed for reliable USBL positioning and acoustic communication and pre-calibrated for fast and easy deployment. Acting as a stationary surface node for the Quadroin, the Buoy exchanges acoustic signals with the vehicle within its range.
-
EvoLogics Sonobot 5 uncrewed surface vehicle equipped with a USBL arm is a mobile alternative to the stationary buoy. Similar to the Buoy, it integrates a USBL antenna, GNSS and wireless access point linking it to the control station. Operating as a surface node, the USV can actively follow the Quadroin, staying within optimal acoustic range for positioning and communication. With the mobility of an autonomous surface drone, the Sonobot ensures continuous coverage and extends operational flexibility for Quadroin missions.
-
A vessel fitted with an EvoLogics USBL acoustic positioning system can act as the primary surface hub for Quadroin missions, serving as the launch and recovery platform, acoustic gateway, and control center
-
For complex, large-scale missions, stationary and mobile nodes can be combined into a hybrid surface gateway network to achieve wide-area coverage and enhance acoustic positioning accuracy. By integrating stationary Buoys and mobile Sonobots, the system can be configured as an LBL array or a hybrid USBL/LBL solution, tailored to specific mission requirements. This flexible architecture improves acoustic geometry, optimizes the accuracy of navigation support, and ensures continuous communication with the Quadroin across expansive areas.
Applications - Quadroin AUV

Critical infrastructure inspection. Surveying harbors, pipelines, cables, and offshore installations with repeated patrols to detect changes in structural conditions or the surrounding environment.
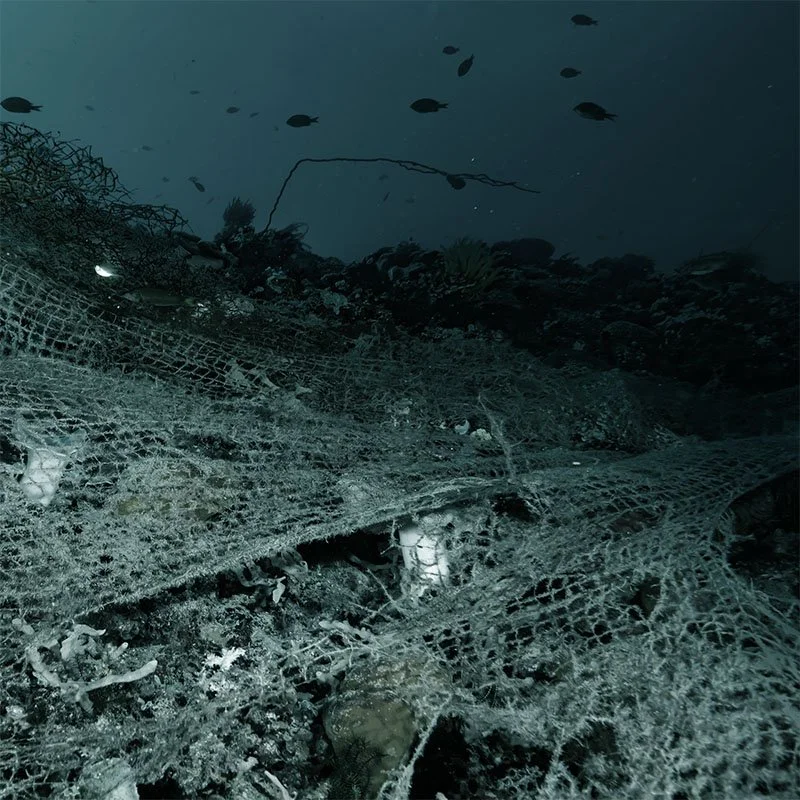
Environmental monitoring and scientific research. Collecting environmental data, surveying sensitive ecosystems, and detecting ghost gear to support research and conservation efforts.

Hydrography. Seabed mapping for navigation, port management, coastal engineering, and environmental impact assessments.

Hazard detection and security operations. Identifying dangers such as mines and unexploded ordnance, supporting both civil and military security applications.
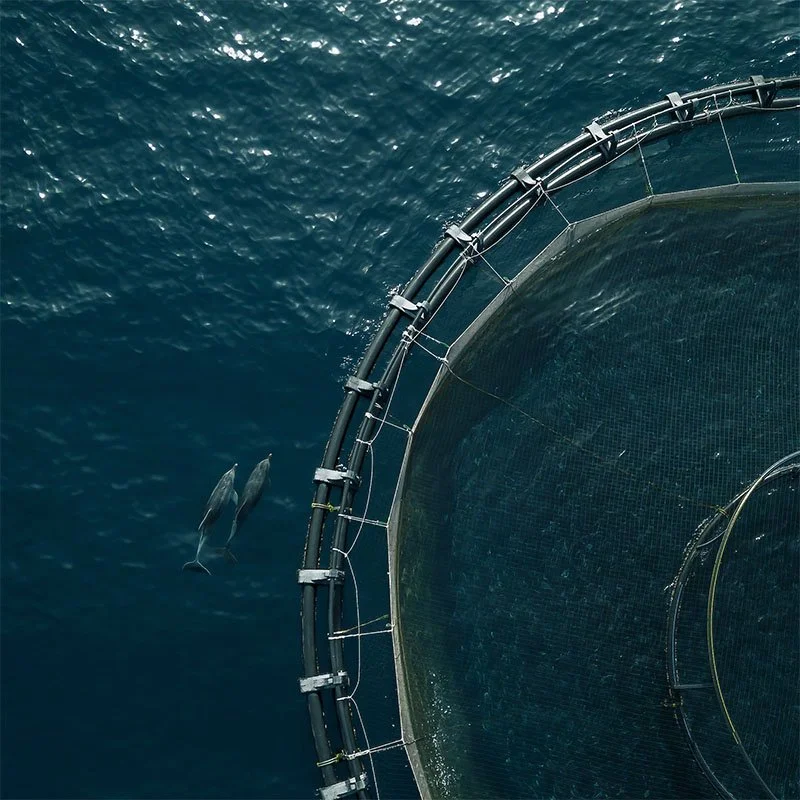
Offshore operations. Monitoring fish farms, subsea construction and dredging sites to support maintenance, safety, and operational efficiency.

Search, rescue, and emergency support. Capturing side-scan and video data with AI object recognition for search and rescue and emergency response missions.
Marine archaeology. Surveying wreck and archaeological sites to support documentation, research, and preservation efforts.
Technical Specifications - Quadroin AUV
-
Operating Depth
150 mSpeed
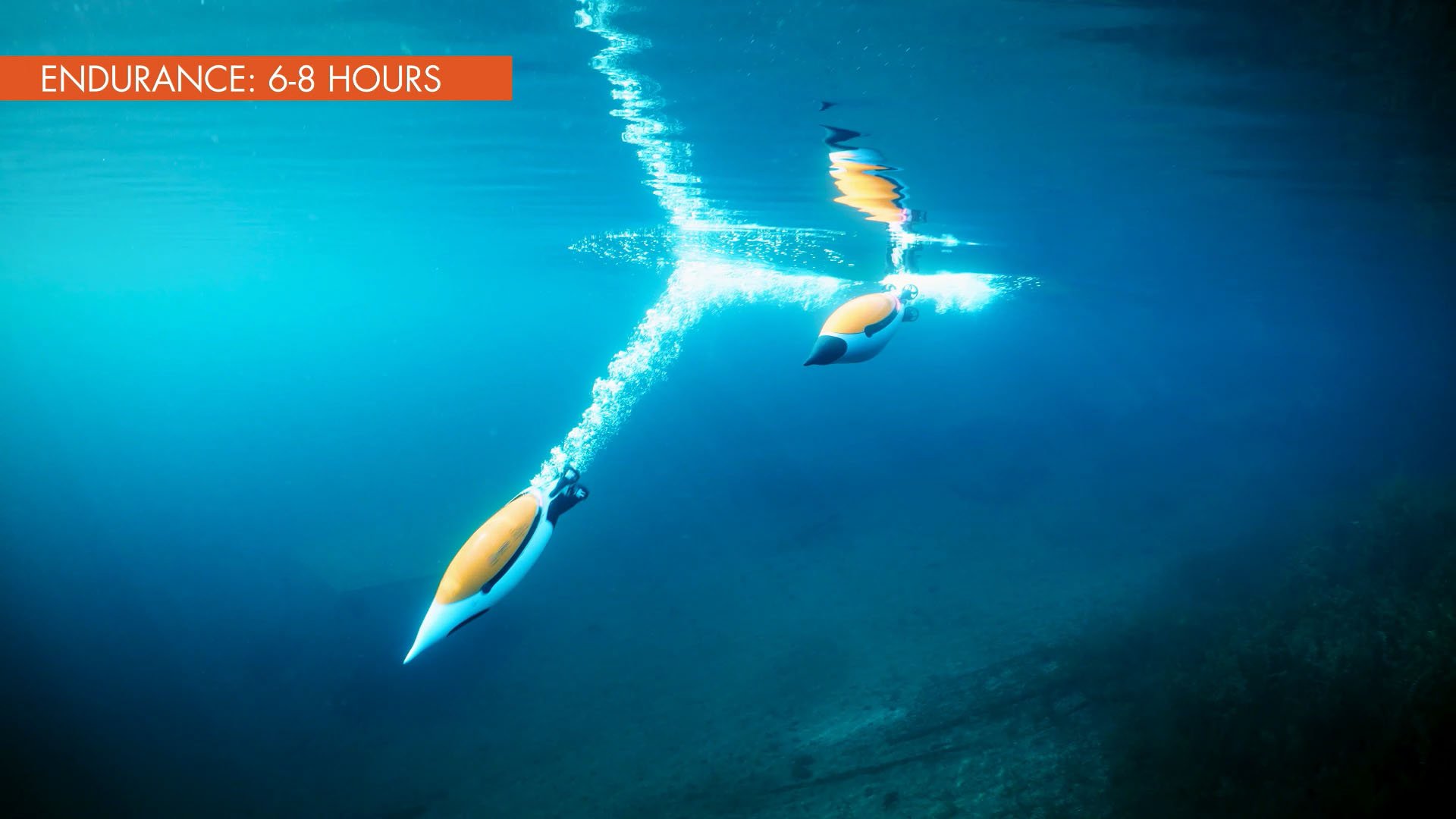
Up to 10 knotsEndurance
Up to 12 h at 1.5 m/s (default survey speed), depending on payload
-
Power Supply
Internal rechargeable Li-Ion batteries,
optionally swappableBattery Capacity
1.3 kWhCharging Time
< 6 hours
-
UW Communication & Positioning
MINI 18/34 acoustic modem with atomic clock, up to 13.9 kbit/sNavigation
GNSS, Nortek Nucleus1000 DVL with AHRS &
INS, USBL/LBL aided positioning, collision avoidance with forward-looking single-beam echosounderRadio Communication
Wifi 2.4 GHz, 863–870 MHz ISM modem (915 MHz optional), StreamCaster 2x2 MN-MIMO 2200–2500 MHz, LTE optionalOn-board PC
EvoLogics AI module for high-end onboard computing
-
Payload Options
Side-scan sonar, downward full-HD camera with dimmable LED lights, object recognition hardware/software, ADCP, CTDPayload Capacity
Up to 3 kgDimensions
Length 1120 mm, Ø 320 mm max.Weight
< 25 kg in air / buoyancy trimmable
Quadroin AUV
Compact and easy to handle, the Quadroin streamlines operations, reduces deployment time, and provides a professional platform for underwater data collection – equally effective as a standalone tool or as part of a coordinated multi-vehicle network.















AI Technologies ·
AI Technologies ·
Object recognition is an advanced feature for Sonobot USV and UUVs.
The AI-based system is an extra module that runs directly onboard the vehicle and analyses raw side-scan sonar or video camera output.
