Poggy - Autonomous Underwater Vehicle
Unique mobility features for surveying and monitoring
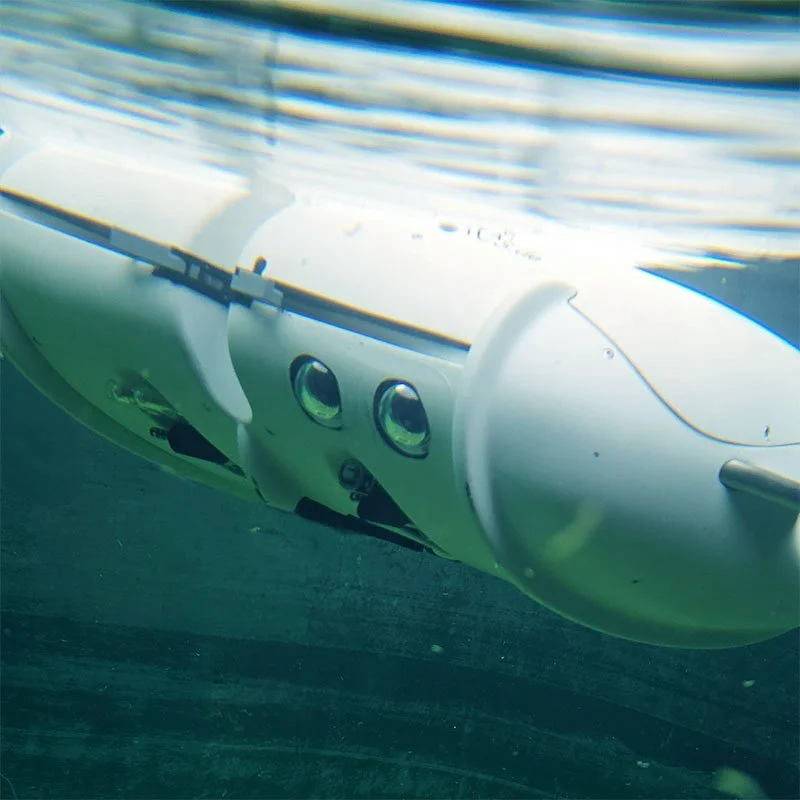
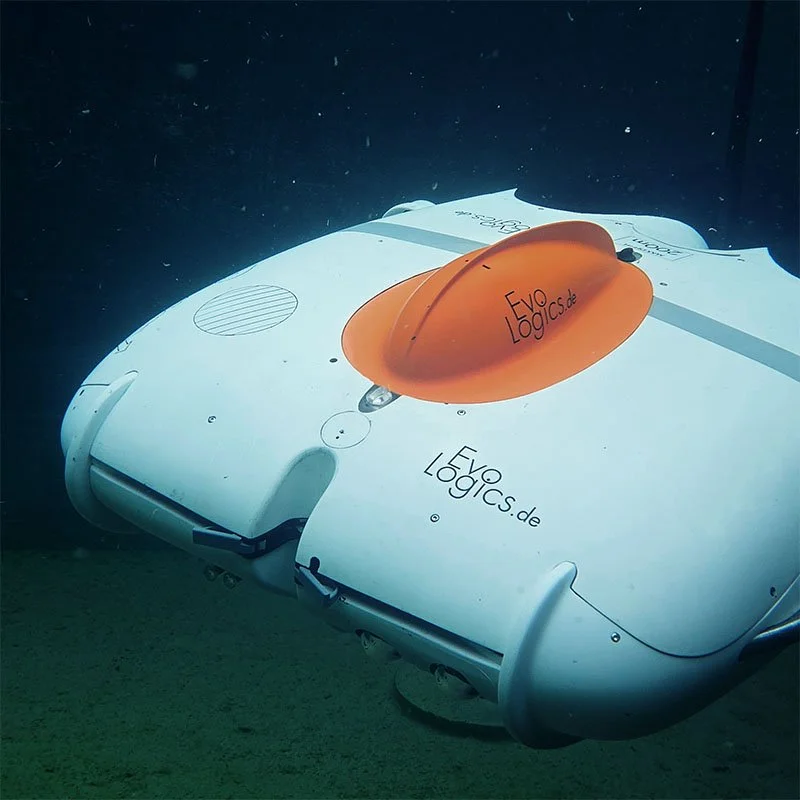
EvoLogics’ Poggy AUV is a cutting-edge autonomous underwater vehicle designed for advanced surveying, marine exploration and monitoring.
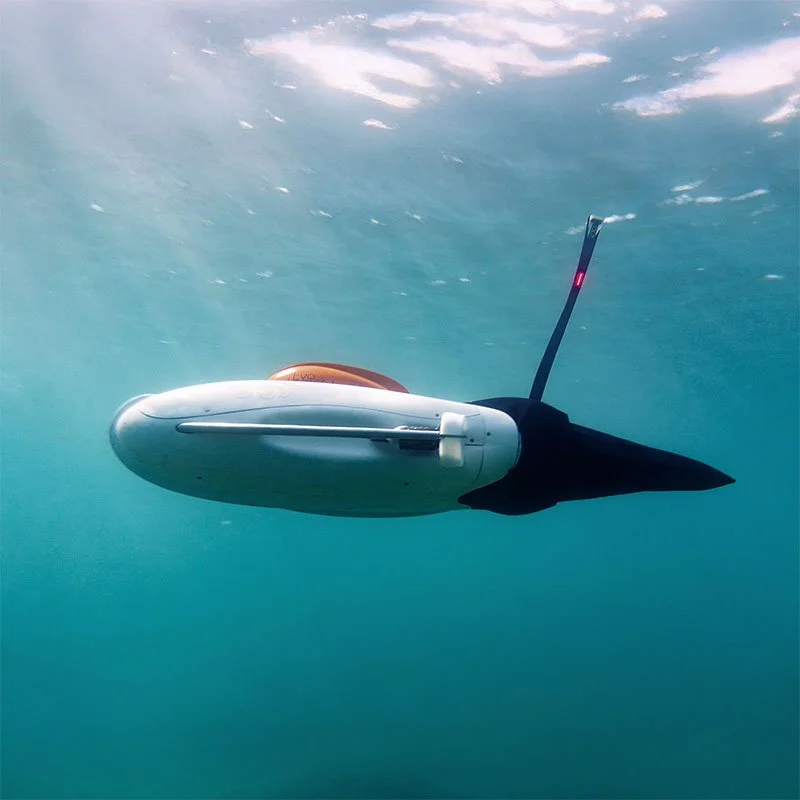
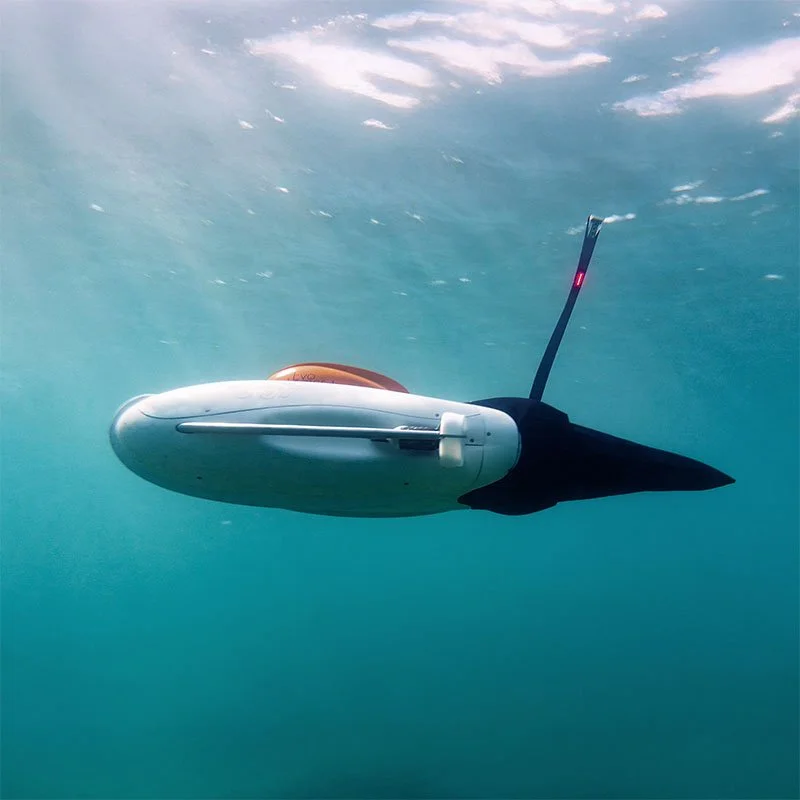
Inspired by nature, Poggy’s innovative bionic design leverages Fin-Ray® technology to deliver unmatched mobility and control in underwater environments.
Key Components and Features
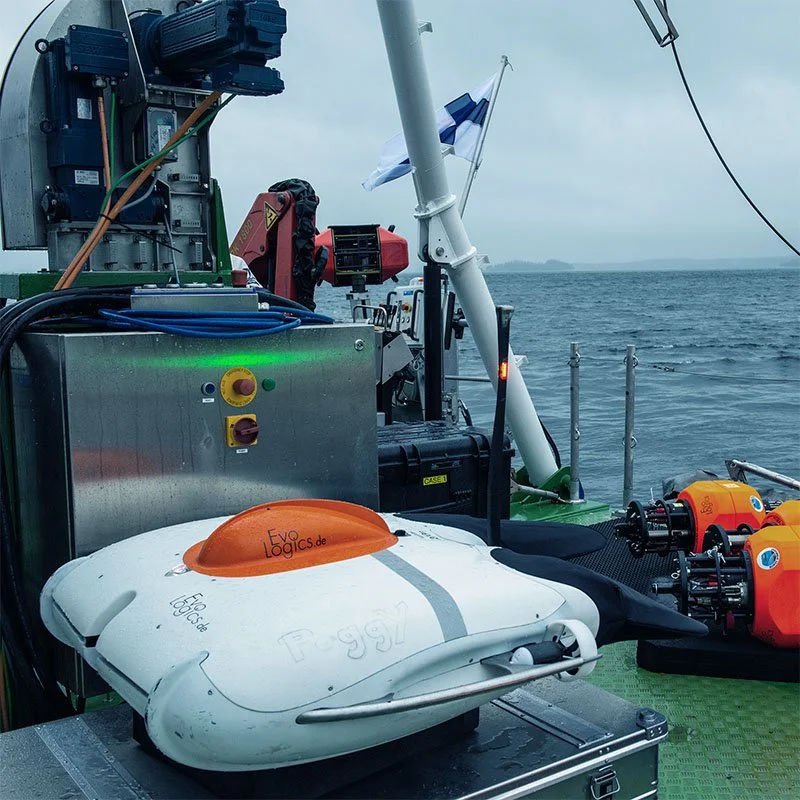
Compact Designe, Large Payload. Despite its compact form, Poggy supports a generous payload capacity and carries multiple sensors, enabling multi-modal data colletion in a single mission.
Unmatched Stability and Control. Poggy maintains excellent roll and depth stability even at low speeds, making it ideal for applications requiring detailed spatial resolution, such ad point cloud surveyes of complex underwater structures.

Bionic Fin-Ray© Tails. Poggy features two independently driven flexible tails based on Fin-Ray© technology. These tails allow for precise heave, pitch, and roll adjustments, supporting dynamic maneuvers including vertical climbs, dives and leveled gliding.
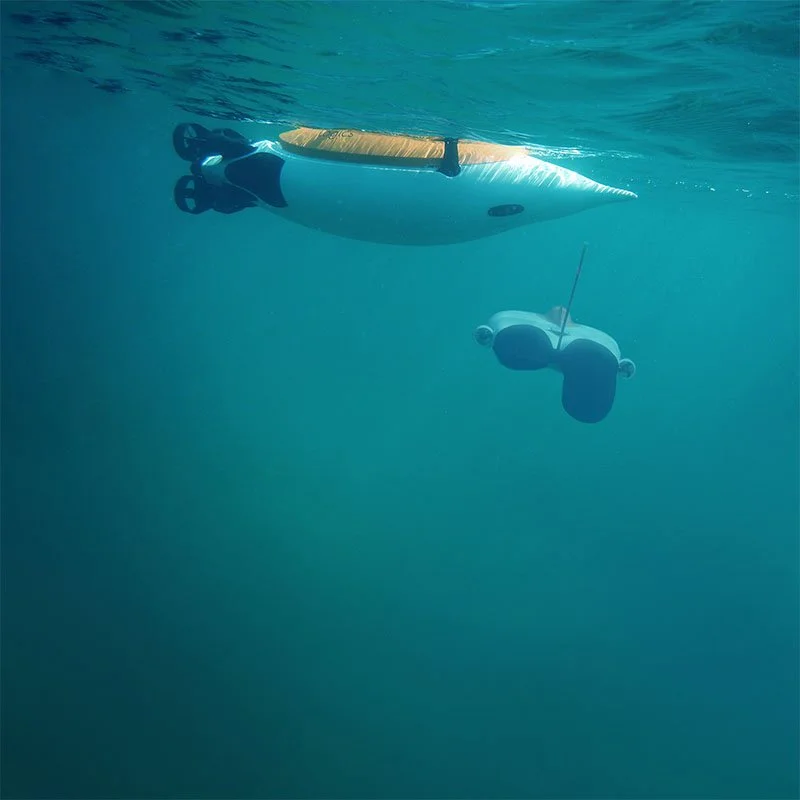
Mobile Navigation and communication hub. Besides collecting survey data poggy can act ax a mobile surface gateway, linking underwater assets to topside control over its integrated acoustic and radio communication systems. Replacing stationary suface nodes, Poggy can follow diver grpups or track AUV´s simplyfying coordination, reducing deployment time, and expandinig mission coverage.

Propulsion and Hovering. A robust twin-thrusteer setup provides agile propulsion and supports stability even during complex maneuvers. Three vertical thrusters provide full hovering capabillity, allowing the vehicle to hold position precisely during inspections, data collection, or low-speed operations.
Payload and Sensor Integration
With the ability to carry multiple instruments simultaneously, Poggy delivers comprehensive survey capabilities without compromising agility or endurance.
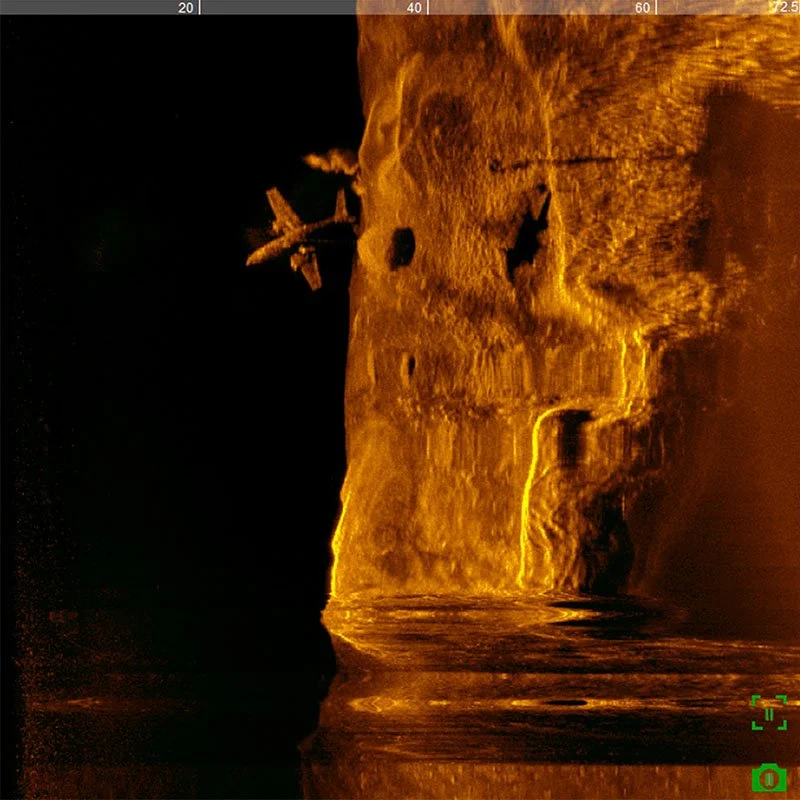
Side-Scan and Forward-Looking Multibeam Sonars. For seabed and infrastructure imaging and smart collision avoidance in complex underwater environments.
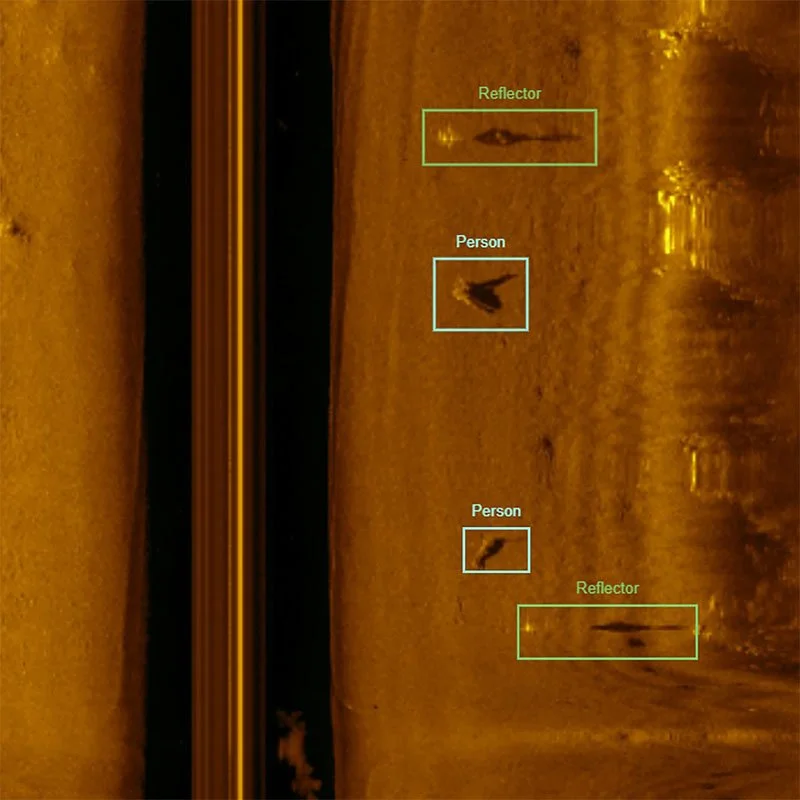
AI-Based Object Recognition and Collision Avoidance. Real-time onboard intelligence identifies objects of interest and enables responsive obstacle avoidance to enhance mission autonomy and safety.
High-Definition Camera and Powerful Lights. Provide detailed visual documentation for inspections, habitat studies, and structure analysis.
Underwater Communication and Navigation System. Advanced acoustic modem with a USBL antenna for accurate positioning and reliable data transfers during operations.

Environmental Monitoring Sensors - optional add-on. Payload bay capacity for additional sensors to collect water quality data for ecological and research applications, including temperature, salinity, turbidity, and other critical parameters.

GNSS and Radio Communication System. Connected at the surface: GNSS for accurate positioning and a collapsible antenna for WiFi or cell data transfers to the control center.

Custom Payloads. Payload bay capacity for custom integration of additional sensors for specialized tasks in research, offshore energy, defense, and beyond.
Optimized for Survey Efficiency
With the ability to perform slow, steady glides and maintain desired roll angles, Poggy is designed to deliver consistent, high-quality data for sonar imaging, bathymetric mapping and feature-specific analysis.