Sonobot 5 USV
Autonomous surface vehicle
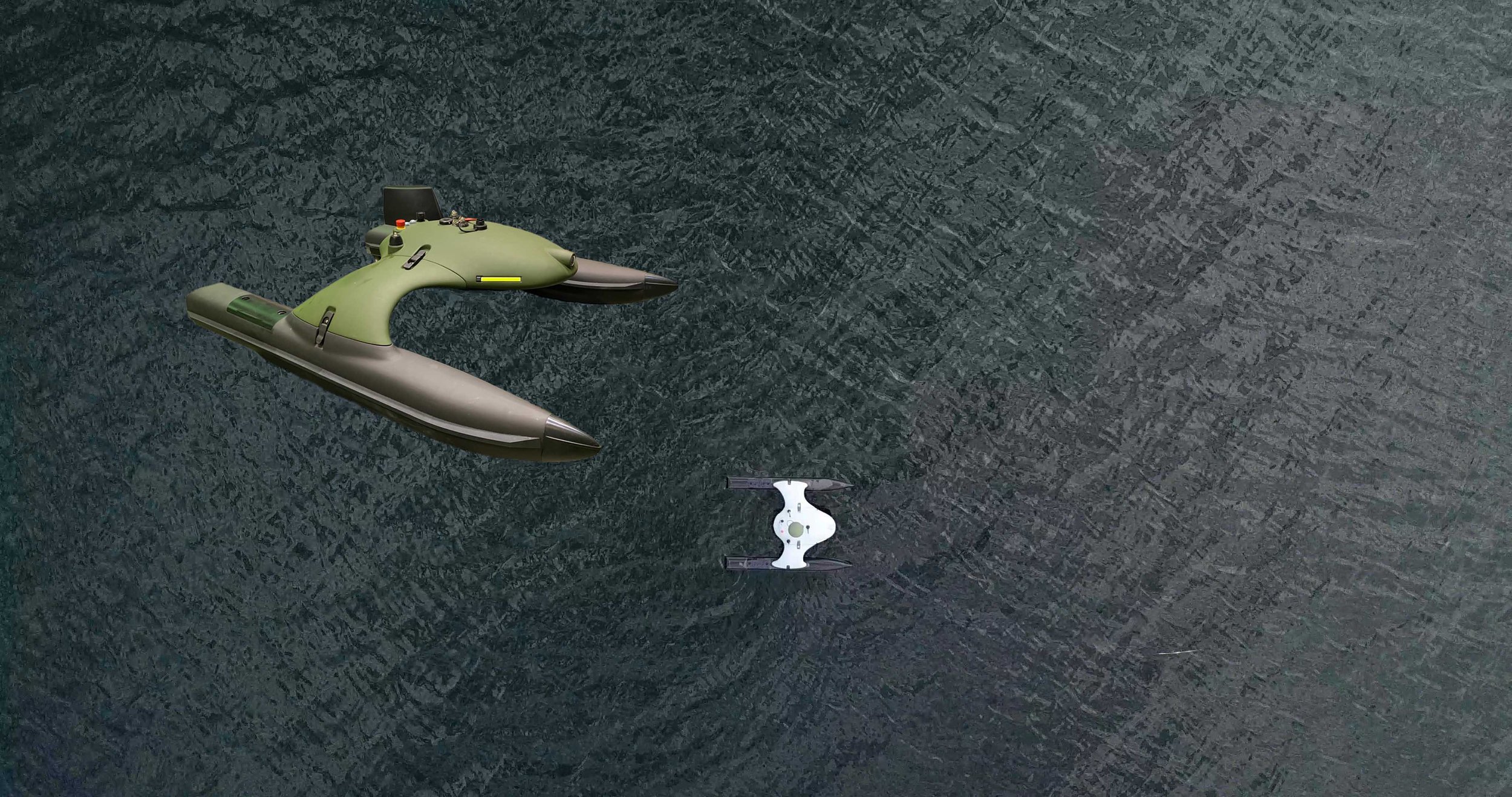
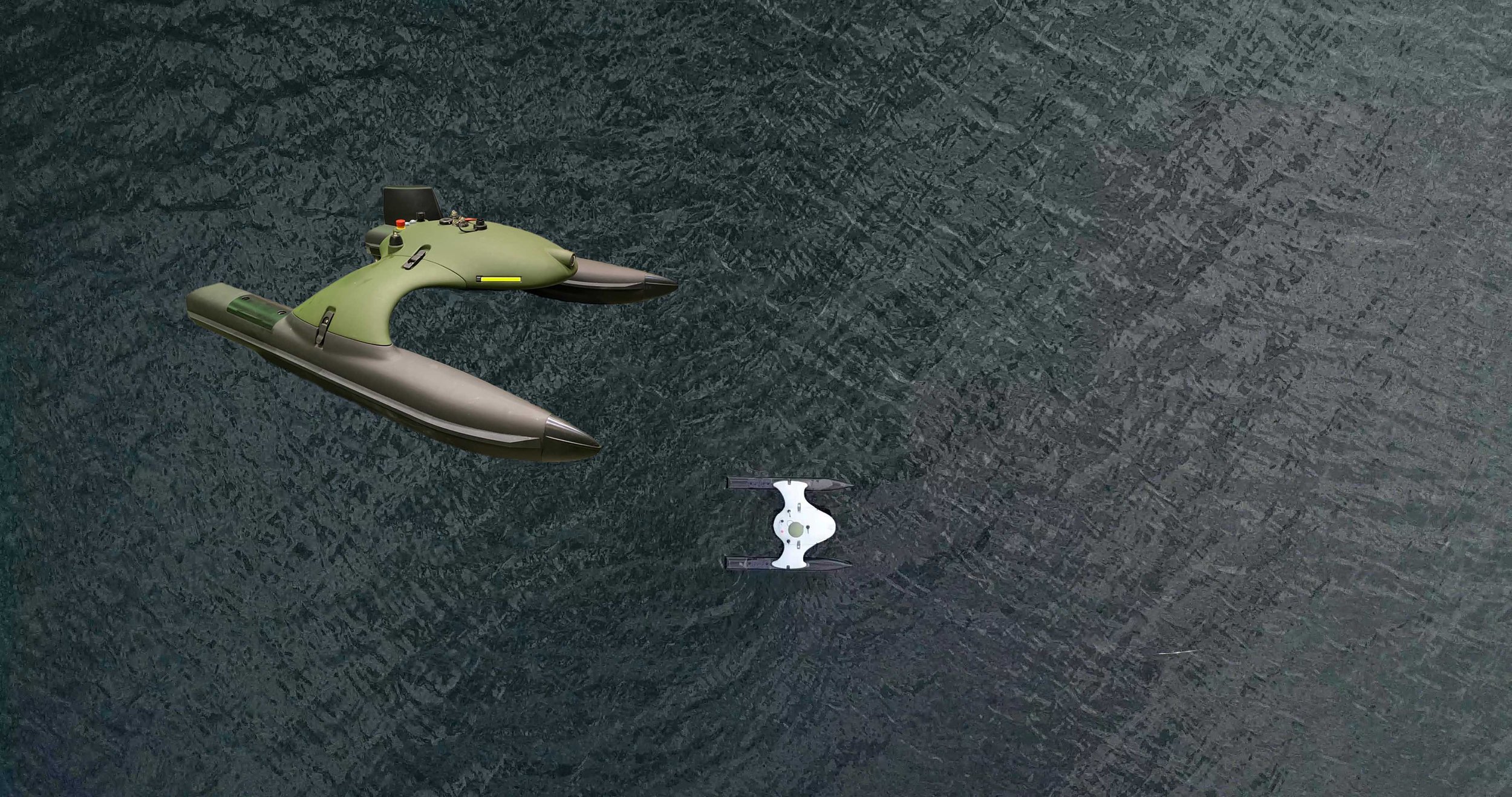
The EvoLogics Sonobot 5 is an advanced uncrewed surface vehicle (USV) engineered for automated hydrographic surveys, infrastructure inspections, environmental monitoring or search and rescue operations in inland and coastal waters.
Compact, robust, and easily deployable by a single operator, it combines professional-grade sensor technology with versatile operation modes to deliver reliable performance in diverse environments.
With its integrated systems and modular design options, Sonobot 5 is available in multiple configurations to meet mission-specific requirements. Optional add-ons, including advanced imaging, extended communication range, and real-time object recognition, expand its capabilities for complex or specialized survey scenarios.
The Sonobot 5 streamlines operations, reduces setup and handling time, and provides a professional platform for data collection and mission support – equally effective as a standalone tool or as part of a coordinated vehicle network.
With onboard AI capabilities, Sonobot 5 efficiently processes and analyzes data, enabling faster decision-making and optimized use of resources. It turns collected data into actionable insights, helping operators achieve more in less time.
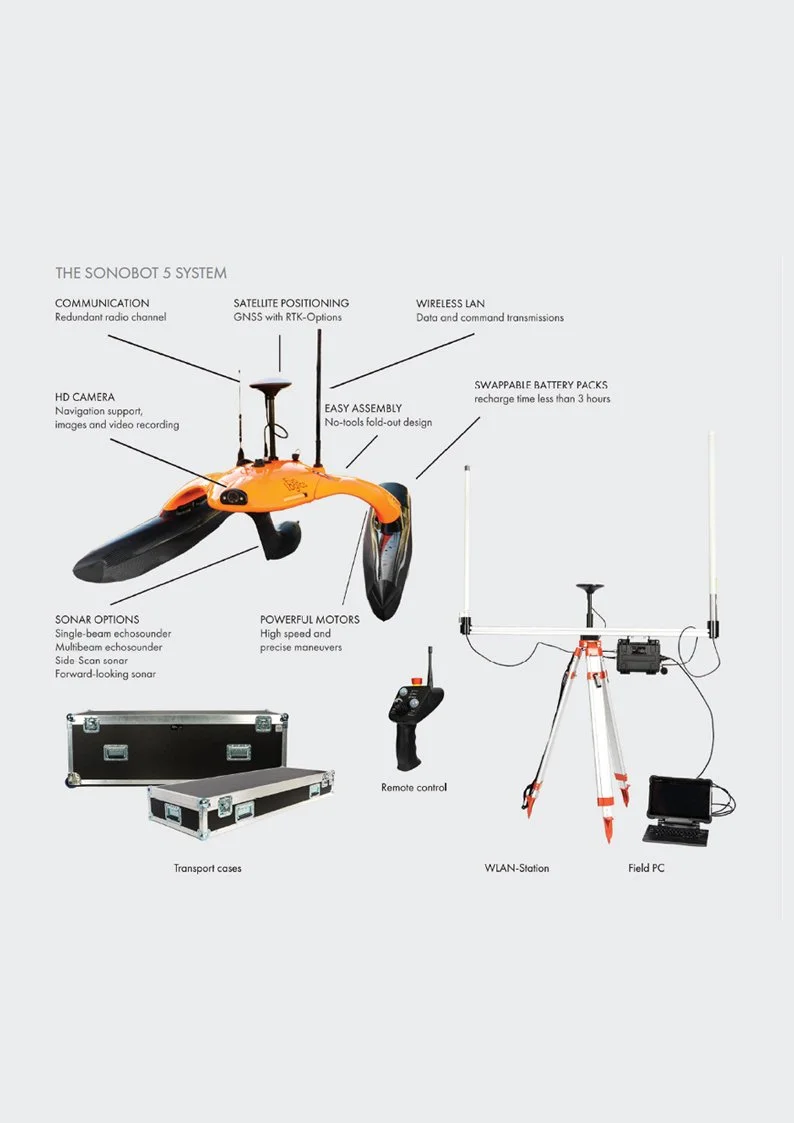
Key Features Sonobot 5 USV









Configuration Options
The Sonobot 5 is available in multiple configurations, from standard survey setups to advanced infrastructure inspection or diver support systems.
Our experts can help you select the right combination of sensors, geopositioning and communication options to match your operational needs.
Whether in rivers, lakes, or coastal waters, the Sonobot 5 can be equipped for maximum efficiency and reliability.
-
With a wide selection of modular options, we build a vehicle precisely tailored to the data types and data quality your missions demand:
Sonars
Single-Beam Echosounder
Delivers depth profiles for accurate bathymetric mapping.
Side-Scan Sonar
Generates detailed images of the seabed and underwater infrastructure.
Multibeam Sonar
Produces high-resolution 3D seabed maps for complex surveys.
Forward-Looking Sonar
Supports the real-time obstacle avoidance system for safe, collision-free navigation.
Imaging
Standard Full-HD camera
Provides navigation support and visual documentation above the waterline.
Underwater Full-HD camera
Supports visual documentation of the seabed and submerged assets.
Thermal camera
Provides (passive) night vision and shoreline reconnaissance, detecting thermal features not visible to the standard camera.
Stereo camera
Enhances collision avoidance and situational awareness by providing depth perception and accurate distance estimation.
LiDAR sensor
Enables high-resolution shoreline mapping and enhances the obstacle avoidance system.
AI add-ons
AI-Based Object Recognition Module
Runs directly onboard the vehicle and analyzes side-scan sonar or video camera feeds - detects and highlights various object classes in the control software onshore.
Acoustucs
USBL antenna arm
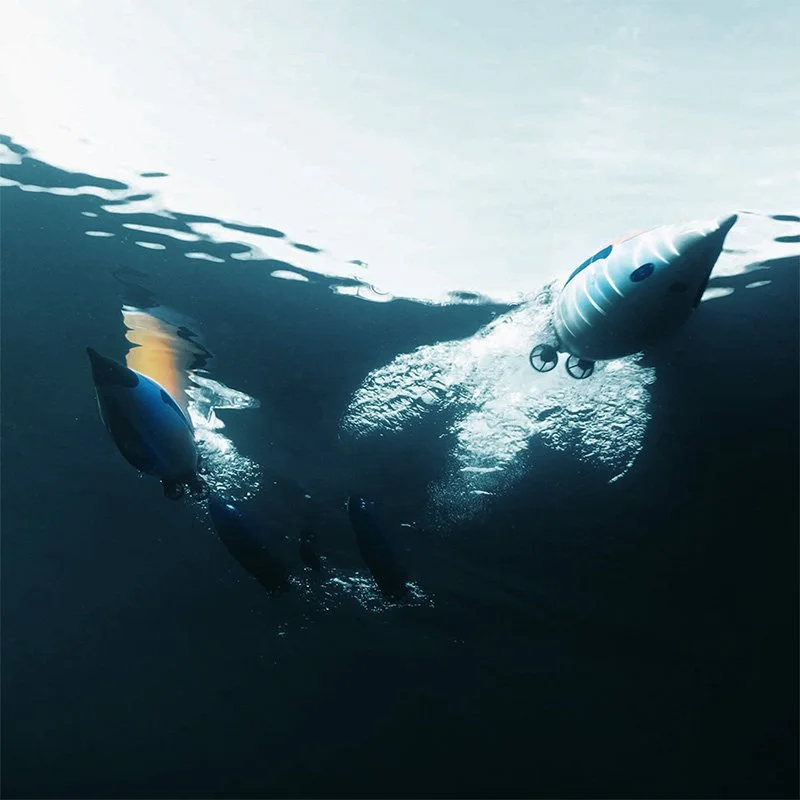
Allows the Sonobot 5 to act as a mobile surface gateway, linking underwater assets, divers, and AUVs to topside control over integrated acoustic and radio communication systems. By replacing stationary surface nodes, it simplifies coordination, reduces deployment time, and expands mission coverage, providing real-time navigation and reliable communication for divers and autonomous underwater vehicles.
-
A selection of GNSS and GNSS-independent systems to ensure all sensor measurements are georeferenced with the required accuracy:
Global Navigation Satellite System (GNSS)
Standard positioning option, provides reliable location data for general survey tasks.
Differential GNSS (DGPS)
Improved accuracy over GNSS with satellite-based correction signals.
Real-Time Kinematic (RTK) GNSS
Achieves centimeter-level accuracy with real-time correction data from a local base station or a mobile service provider.
Total Station
Accurate positioning without relying on GNSS signals - tracking under bridges or near tall structures where satellite reception is blocked.
-
Maintain a reliable link between the Sonobot 5 and the control station across the full operational range of your missions:
WiFi
Direct connection to the vehicle, up to 100 m range.
WiFi with land station
Tripod-mounted antenna extends the WiFi range to up to 1000 m under optimal conditions.
Long-range radio with land station
Maximum coverage for extended operations, 2+ km under optimal conditions.
Cellular LTE or Iridium Satellite Links
Reliable connectivity beyond the line-of-sight.
Some Sonobot 5 configuration examples




Applications





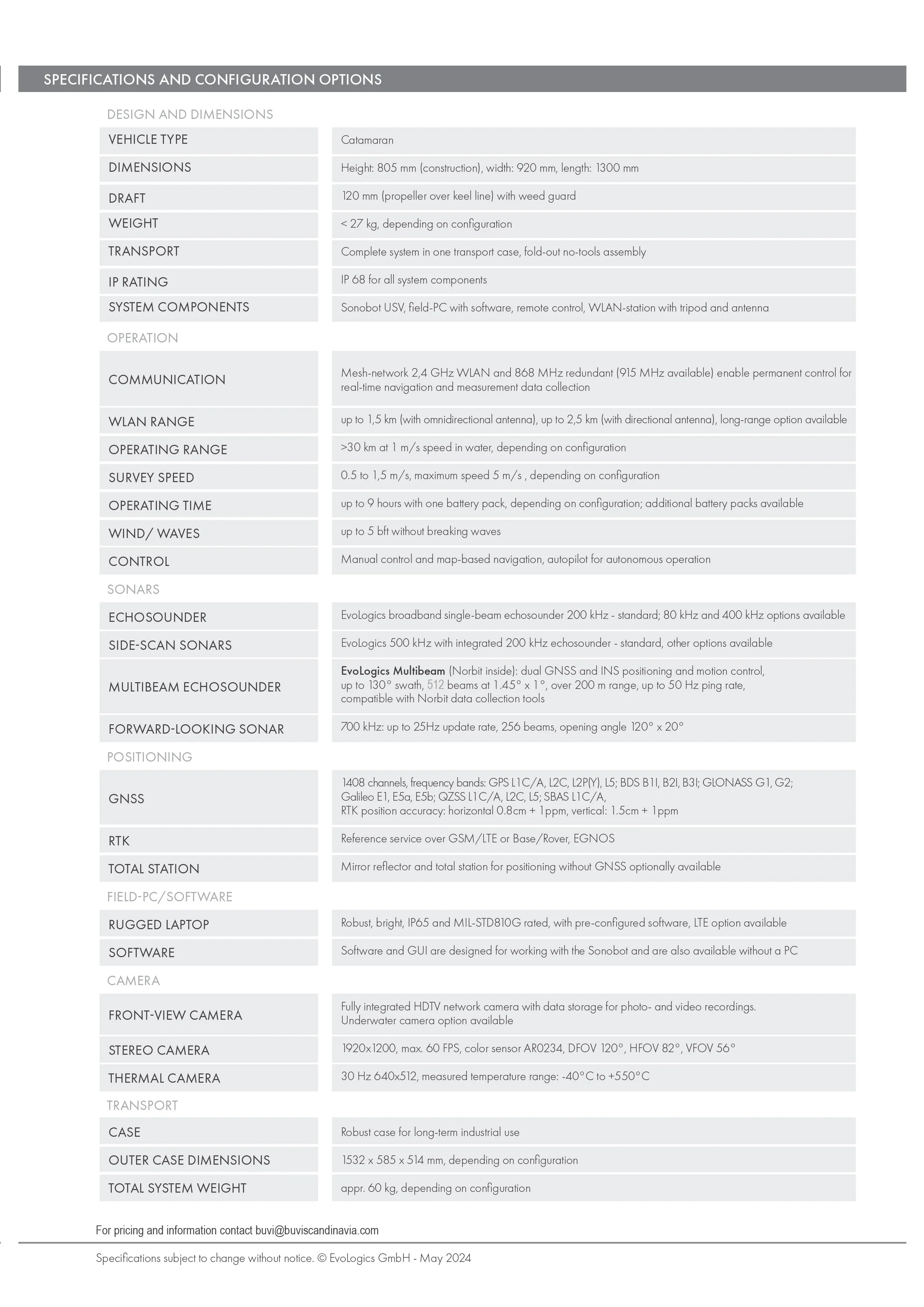
Technical Specifications
-
Type
Catamaran
Height
810 mm (design), 690 mm (swimming)
Width
954 mm
Length
1291 mm
Draught
120 mm (propeller over keel line)
Weight
24 - 33 kg, depending on configuration
Transport
Entire system in two boxes, tool-less assembly and disassembly
Protection type
IP 68 for all components
Components
Sonobot USV, field PC (not included) with software, radio remote control, land station with tripod and antennas
-
Communication
Mesh WiFi network (2.4 GHz), redundant radio channel 868 MHz (915 MHz optional), real-time control
Wifi antenna
Up to 800 m omnidirectional, 1.5 km directional, 2+ km optional StreamCaster radio
Working region
>30 km at 1 m/s depending on configuration
Measuring speed
0.5–2 m/s over ground
Wind / waves
Up to 5 Bft, no breaking waves
Control
Manual and map-based navigation, autopilot in autonomous mode
-
Echosounder
EvoLogics S2C, center frequencies 80/100/200/400 kHz
Side-scan sonar
EvoLogics 500/200 kHz (can be combined with echosounder)
Multibeam sonar
EvoLogics MBES (Norbit), up to 130° swath, 512 beams at 1.45° × 1°, >200 m range, up to 50 Hz ping rate, compatible with Norbit data tools
Forward-looking sonar
EvoLogics 700 kHz, up to 40 m range, < 8 mm resolution, 120° × 90° view, 256 beams, 25 Hz max update, 15° mounting angle downwards
-
GNSS
1408 channels; GPS L1C/A, L2C, L2P(Y), L5; BDS B1l, B2l, B3l; GLONASS G1, G2; Galileo E1, E5a, E5b; QZSS L1C/A, L2C, L5; SBAS L1C/A
RTK
Reference via GSM/LTE or base/rover; EGNOS; horizontal 0.8 cm + 1 ppm, vertical 1.5 cm + 1 ppm
Total station
Mirror reflector & total station optionally available for positioning without GNSS
-
Rugged PC
Robust build, high-brightness display, IP65 and MIL-STD810G, pre-configured software, LTE/GNSS optional
Software
Dedicated Sonobot control suite; pre-installed or available as a standalone license for third-party hardware
-
Standard camera
Fully integrated HDTV network camera, photo/video storage
Underwater camera
Optional in submergible pod, 45° downwards, 111° wide-angle, Full HD, real-time images, manual or mission control via Neptus, photos/videos stored separately
Thermal camera
640 × 512, 30 Hz, -25 °C to +150 °C, 13 mm lens, 45° × 37° FOV, operating -15 °C to +50 °C
-
Case
Heavy-duty build for long-term professional use
Outer dimensions
1532 × 585 × 514 mm, depending on configuration
Total weight
Approx. 60 kg, depending on configuration

Military, Security and surveillance solutions











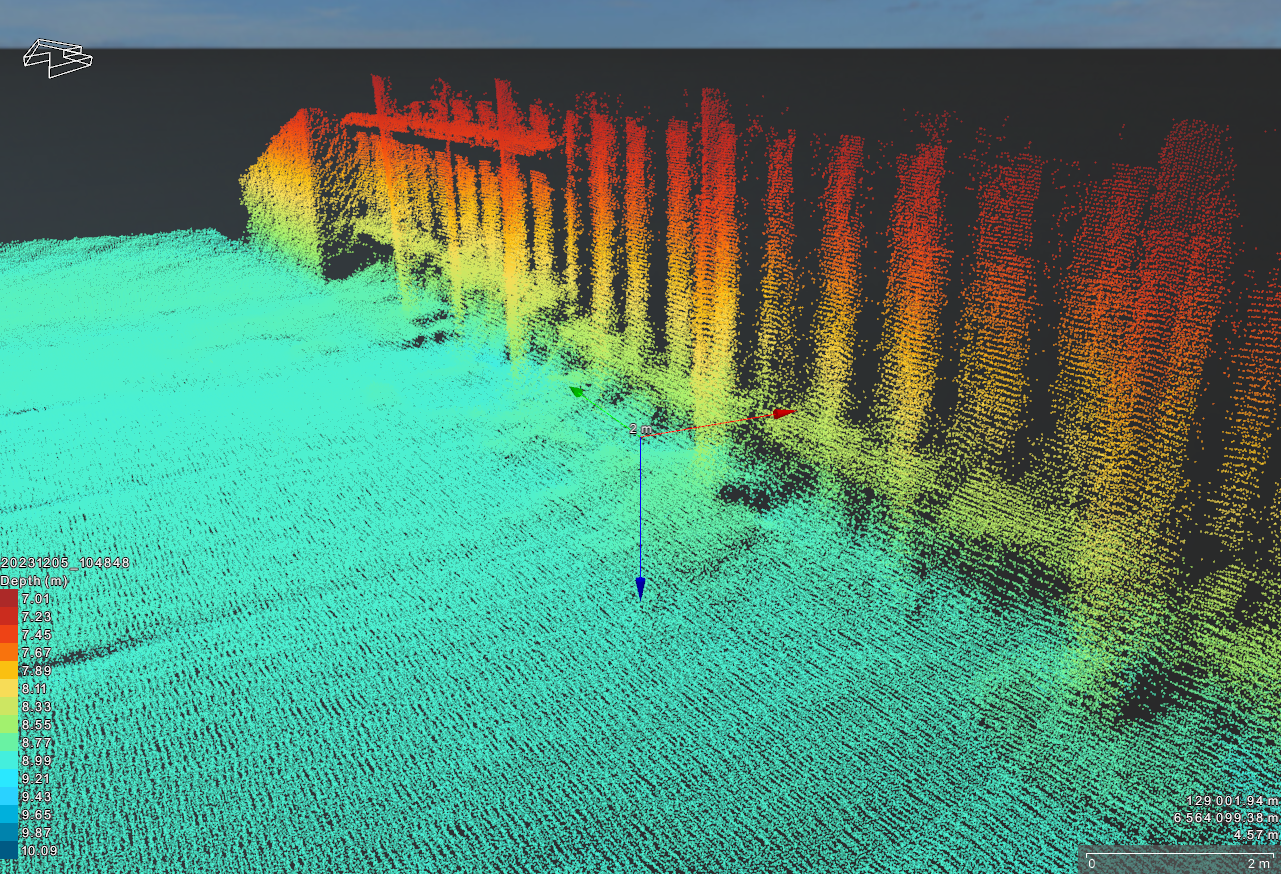
Hydrographic surveys and visualization of Seabed conditions
Equip the SONOBOT USV with Sidescan sonar or Multibeam.
Collect data from surveys and mapping with the precision a Sonobot USV can give you. Customize according to your assignments.
Different types of sea surveying:
Seabed mapping in waterways, lakes and harbours
Find wires and wreckage
3d modeling of the bottom
Volume calculations
Inspection of marine structures
Search and location in a safe way
Surveys and mapping from 1 - 200m depth
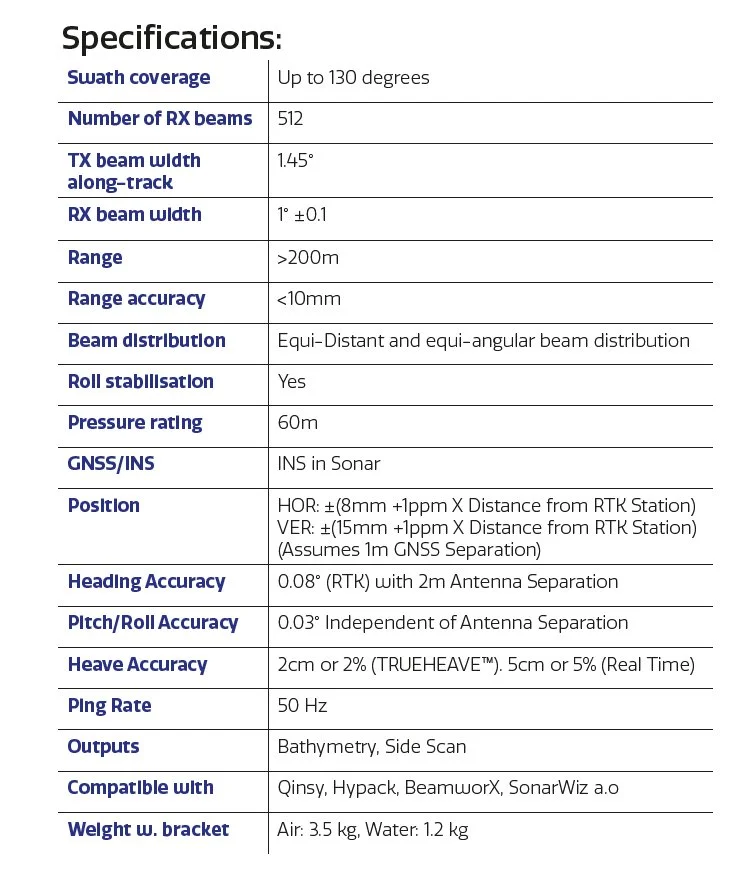
Sonobot equipped with Multibeam
M7 Integrated Multibeam Sonar
M7 is a highly-versatile, high-resolution multibeam echo sounder, which is also extremely simple to use and to install on the vehicle. The tightly coupled GNSS INS makes it easy to integrate even on ultra-small vehicles and very quick to mobilize. Its hydrodynamic form factor and its low power consumption makes it the perfect choice for small autonomous surface vehicles, data acquisition included.
It comes with a high-grade dual GNSS and INS positioning and motion control which is standard for all Norbit echosounders. With 512 beams at 1.45°x1°, a range of over 200 m, and a ping rate of 50 Hz.
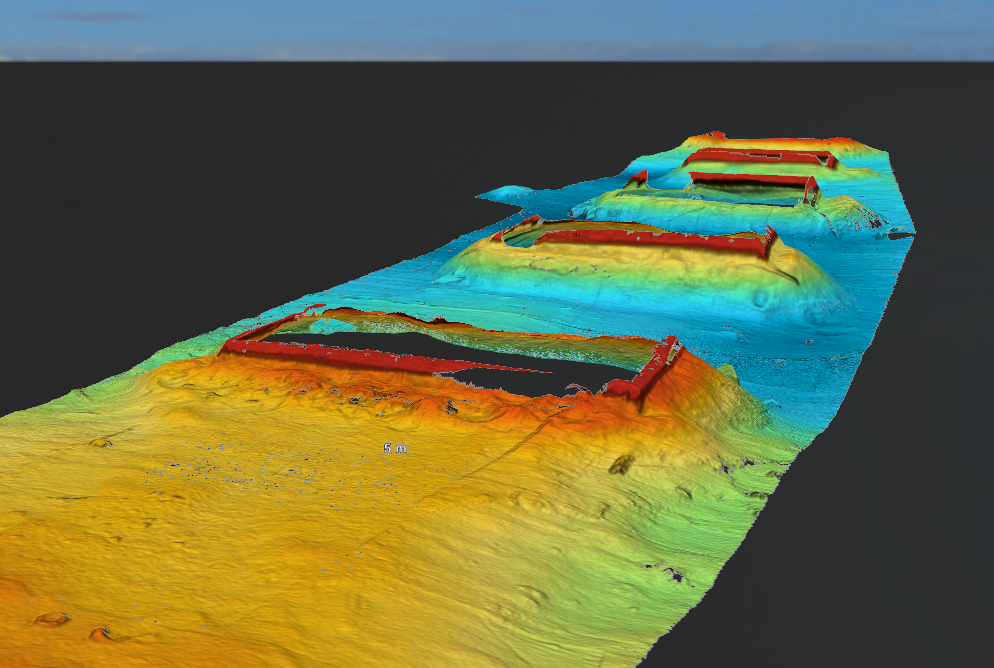
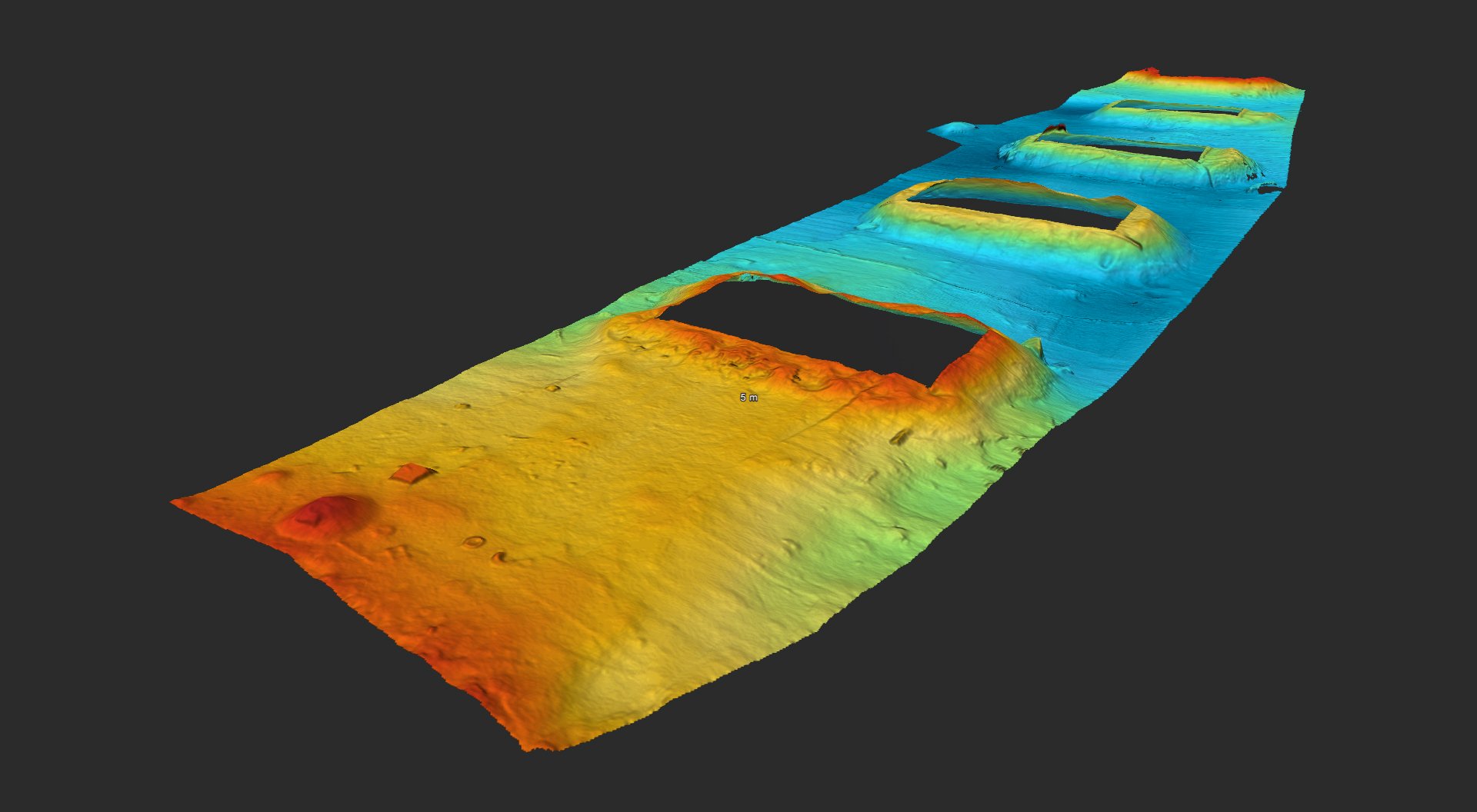
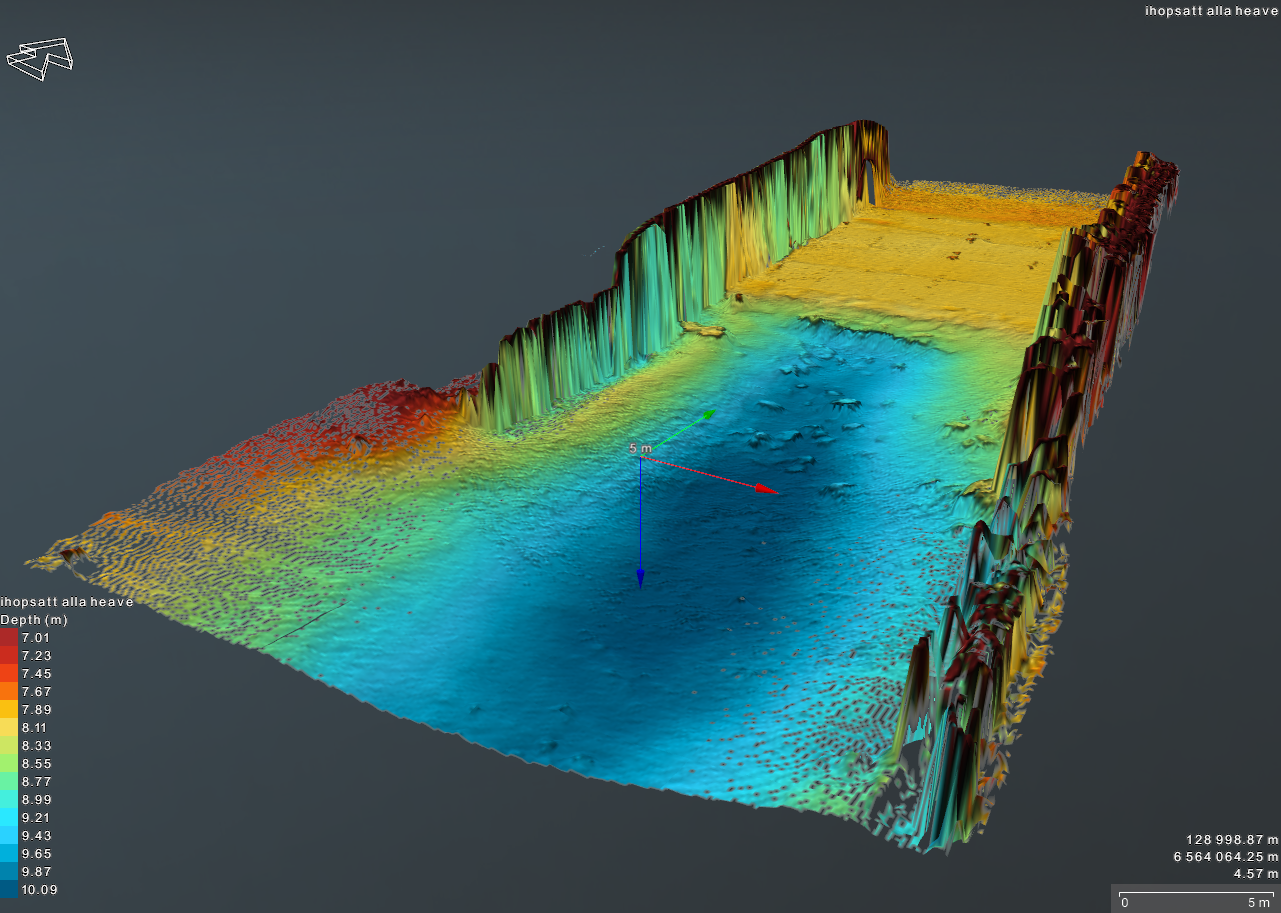
MULTIBEAM PICTURES
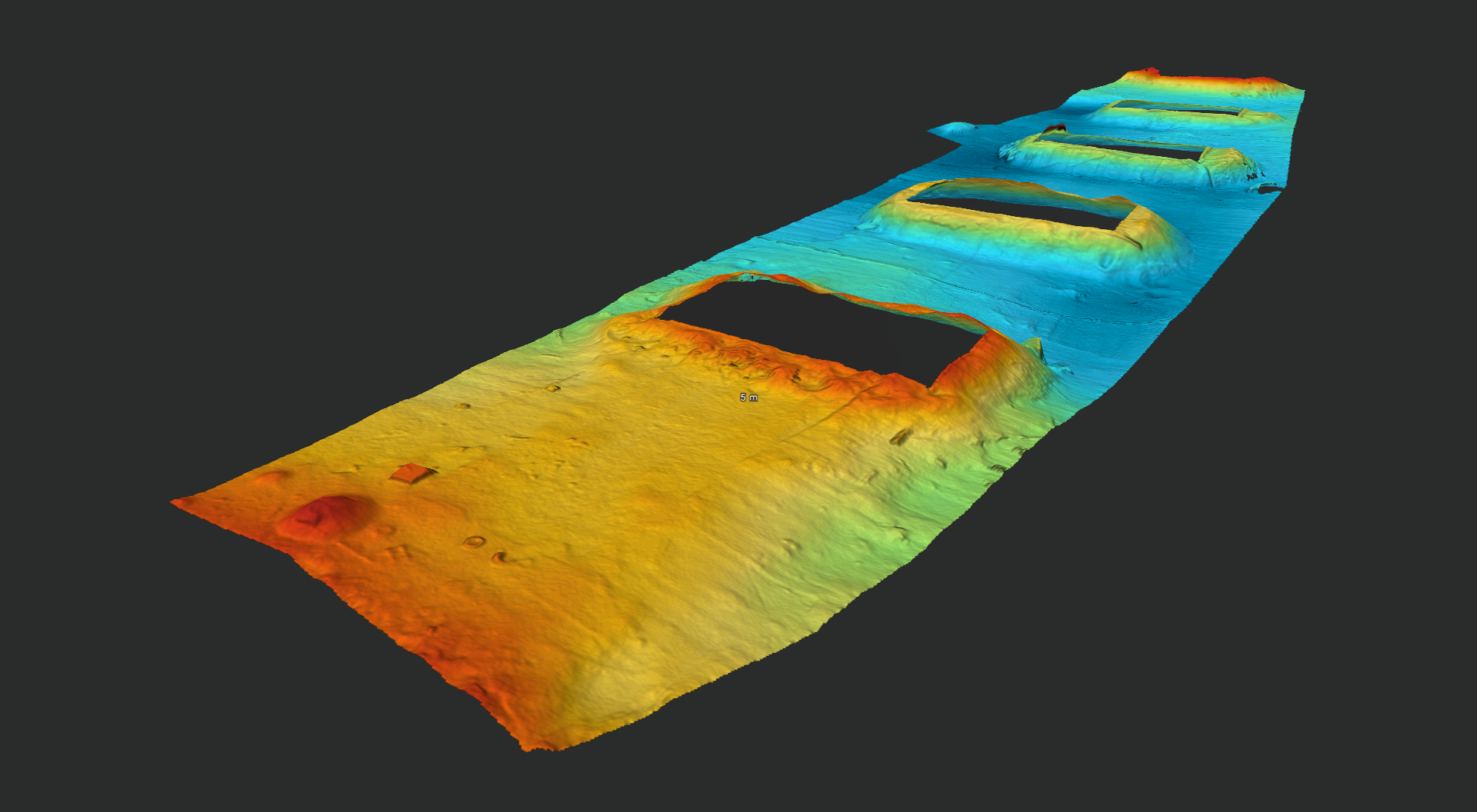
Bridge foundations on the seabed. (Pic: InfraGeaTech)
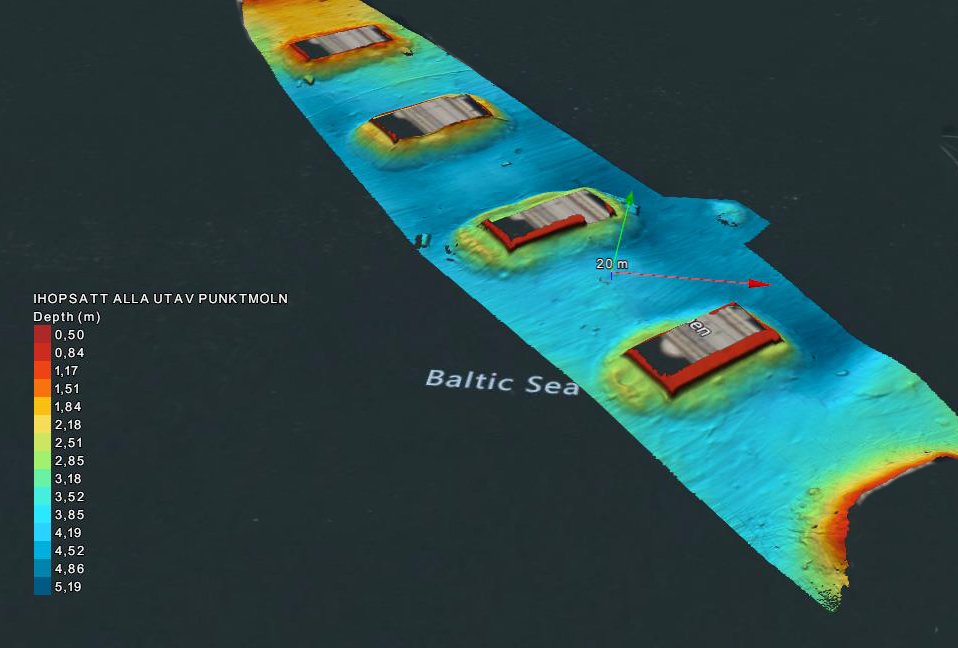
Bridge foundations on the seabed. (Pic: InfraGeaTech)
Fairway. (Pic: InfraGeoTech)
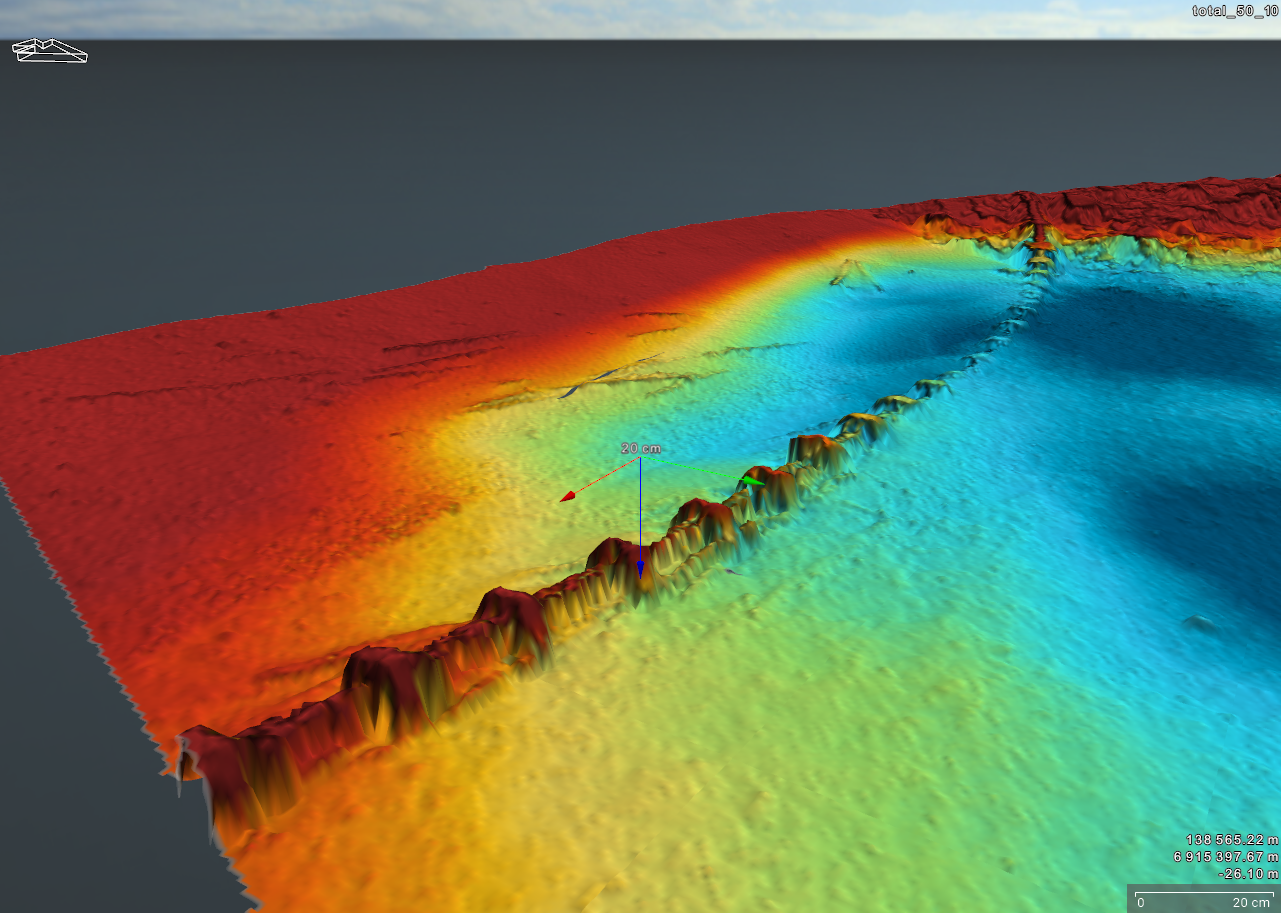
Pipe at the seafloor. (pic: InfraGeoTech)
Quay wall. (Pic: InfraGeoTech)
Sonobot Data Bathymetry & Side Scan
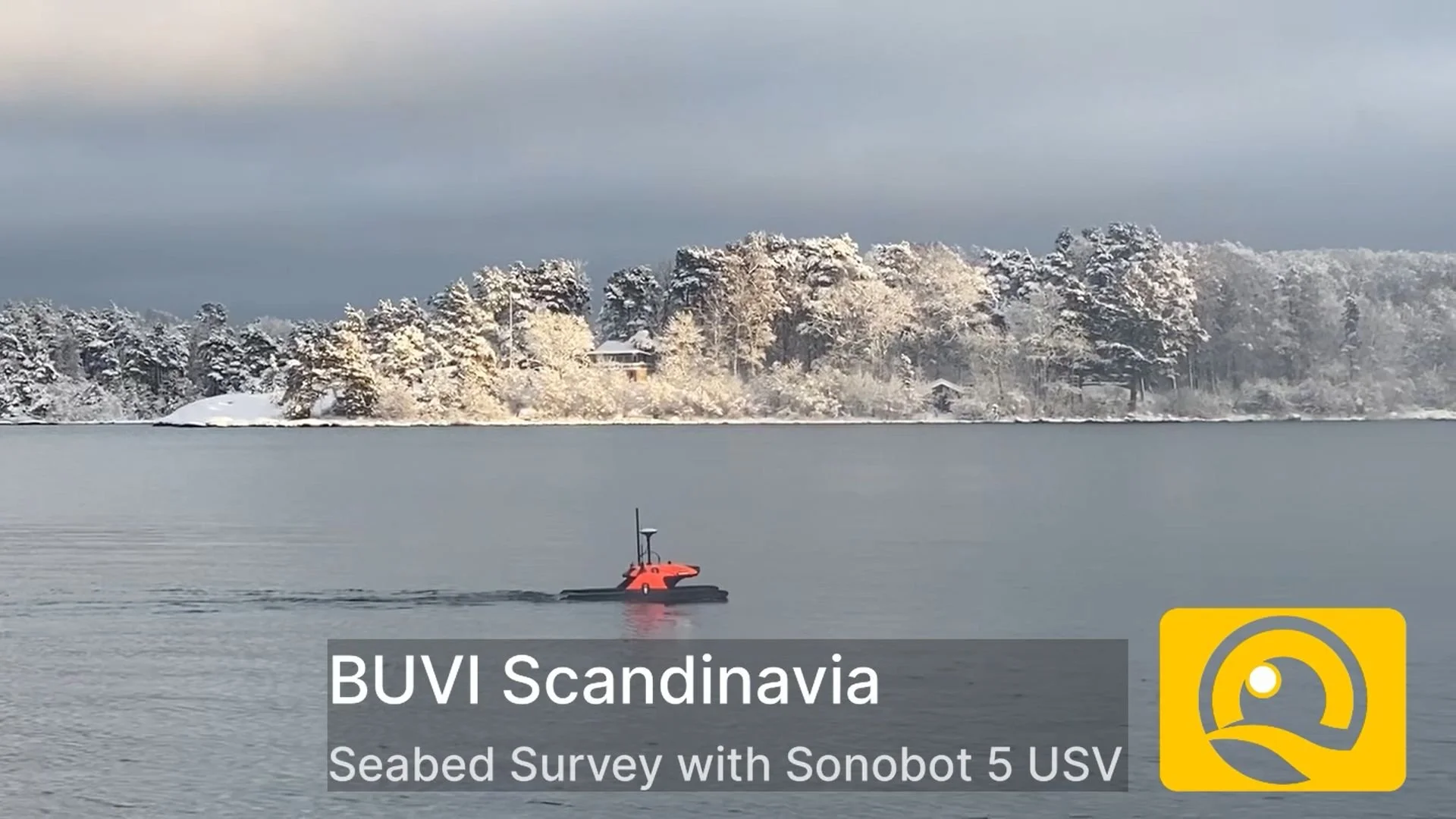
Seabed Survey with Sonobot 5 USV

Sonobot 5 performs flawlessly even in winter climates: during survey, the battery sustained an uninterrupted 8‑hour mission in temperatures between –6 and –9°C.
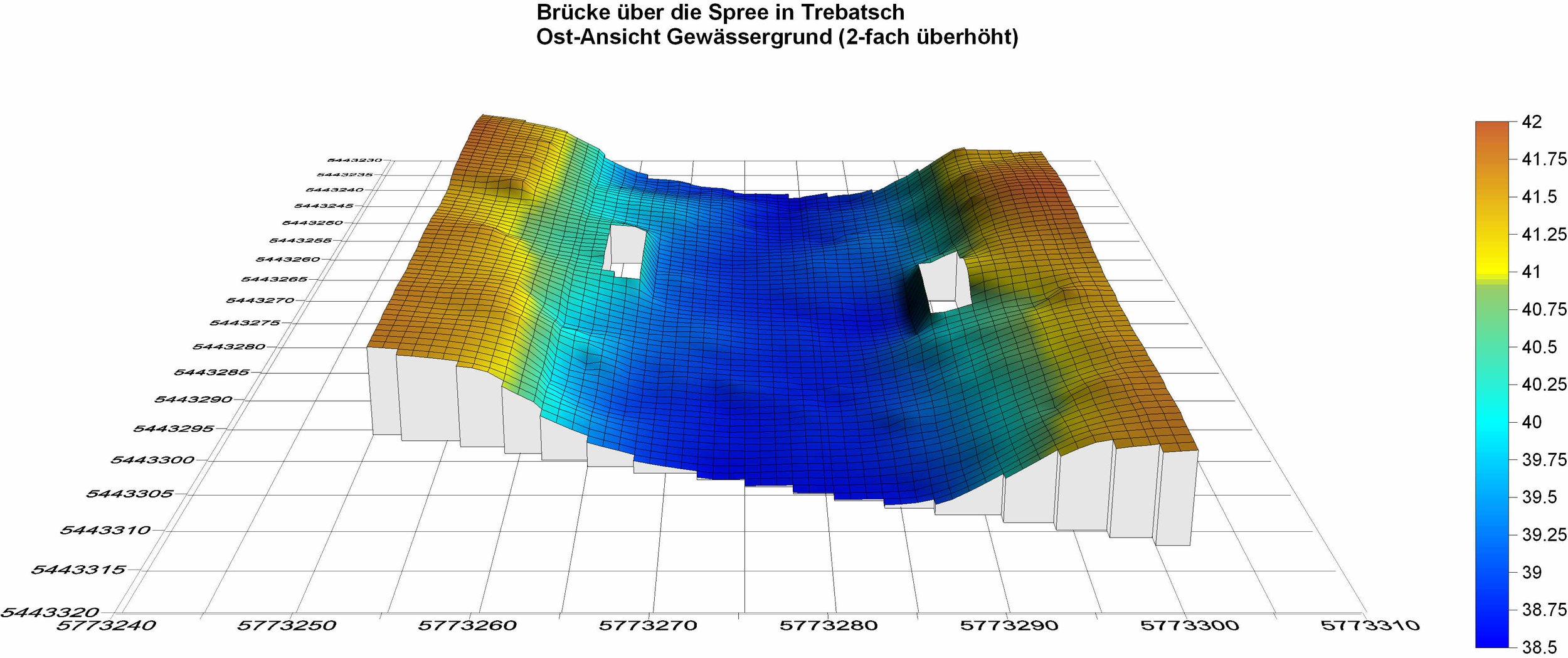
3D topographic map with color gradients showing elevation levels, labeled in German, of a waterbody or landscape area with two openings or channels.
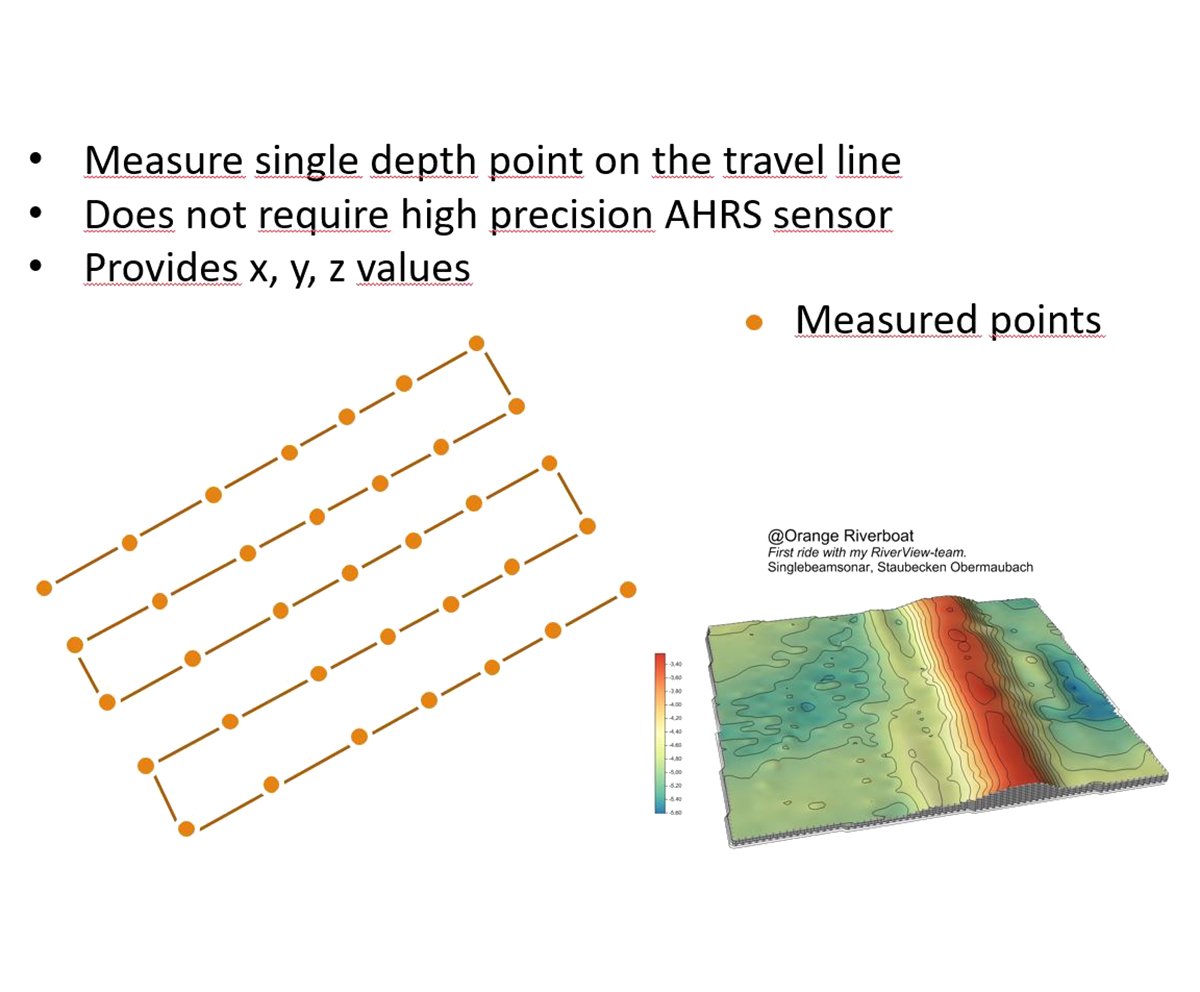
Slide showing instructions for measuring single depth points on a travel line, with bullet points indicating it does not require high precision AHRS sensors and provides x, y, z values. Contains a diagram of measured points connected by lines on a 3D surface plot, with a color-coded terrain map.
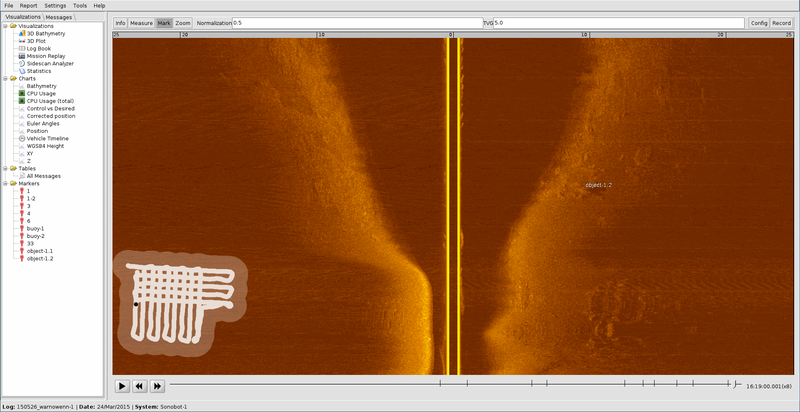
Screenshot of a sonar or underwater imaging software showing a grid and a highlighted object labeled 'object 1.2' in an orange underwater environment, with a white chalk-like drawing in the lower left corner.
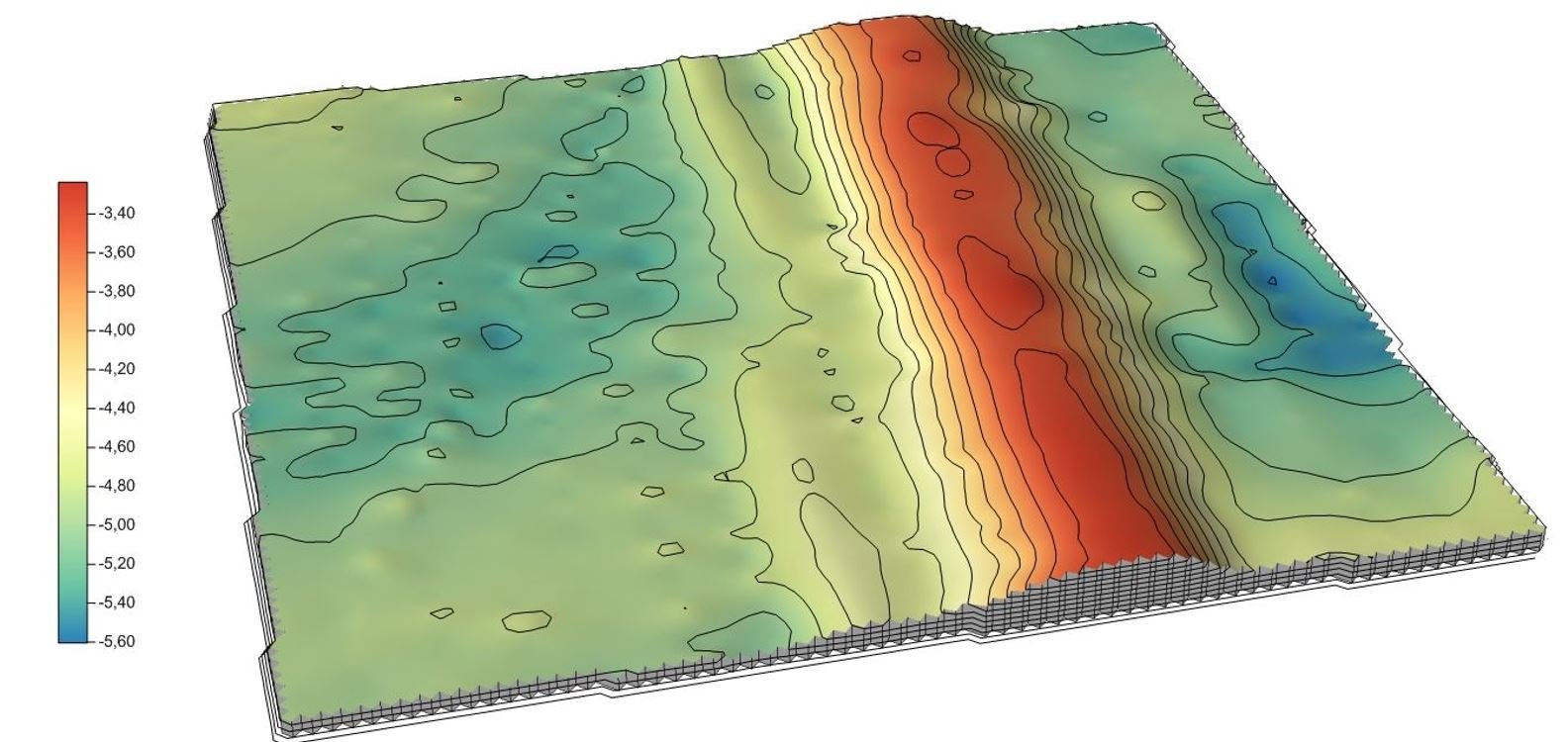
3D topographic map with contour lines and a color gradient from blue to red, indicating elevation or other data values.
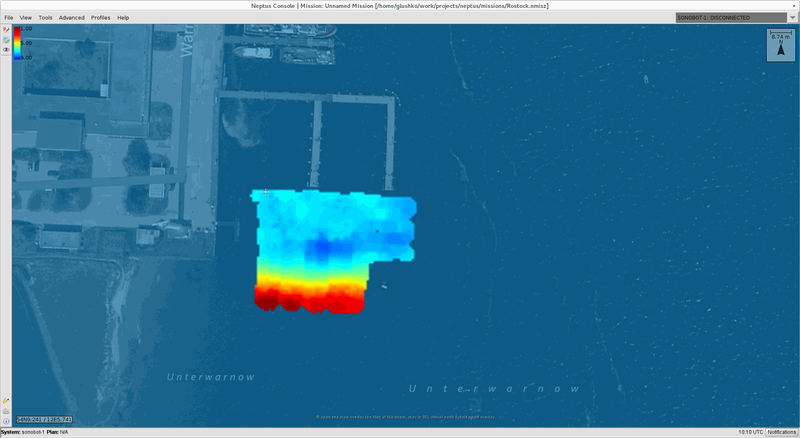
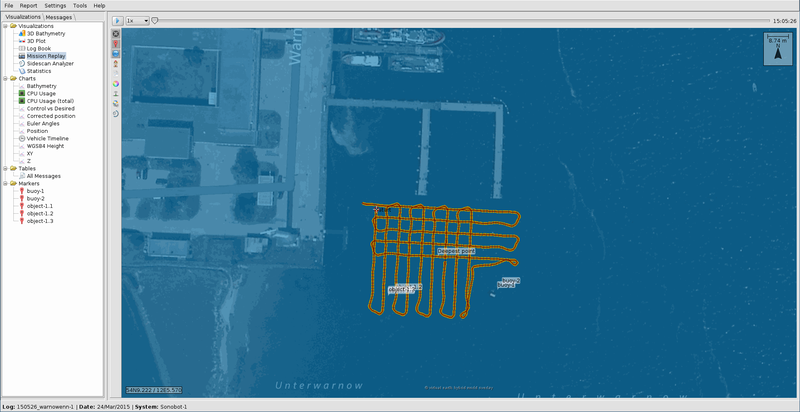
A digital map displaying a satellite or aerial view of a city block with a color-coded overlay indicating water depth or flow, with blue representing shallow water and red representing deeper water in a specific area.
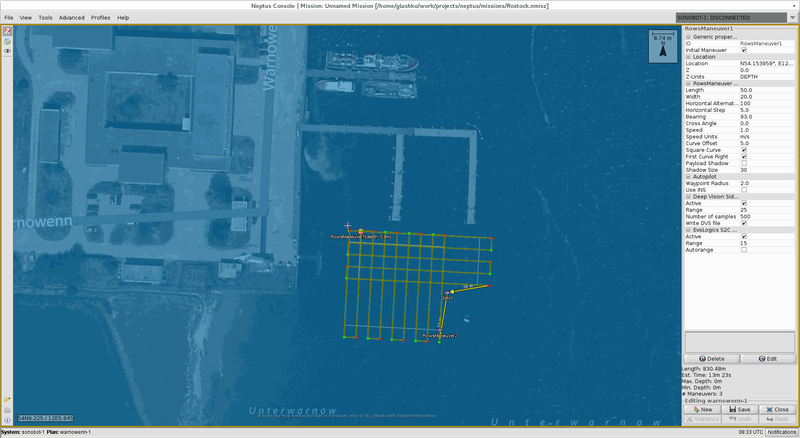
A computer screen showing a drone flight planning software with a map view, flight path grid, and various sensor and camera settings on the right panel.
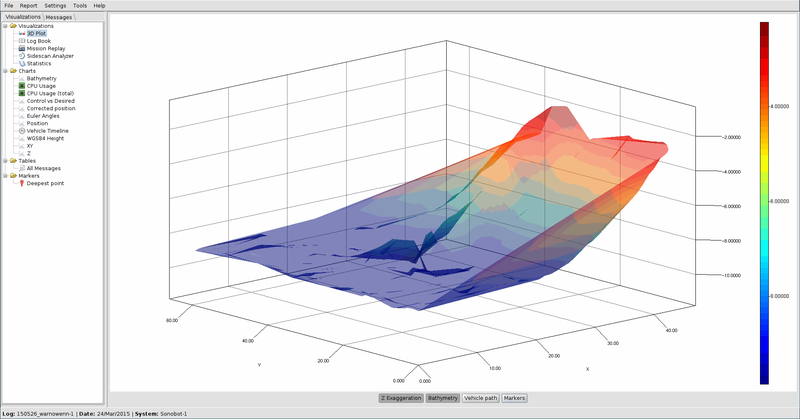
A 3D color-coded surface plot showing data with x, y, and z axes, with a color gradient bar on the right indicating different data values, and a sidebar with various data and visualization options.
A screenshot of a drone flight planning map showing a grid pattern in orange over a dark blue background, with labels and a map legend on the left side, and a compass rose on the top right corner.
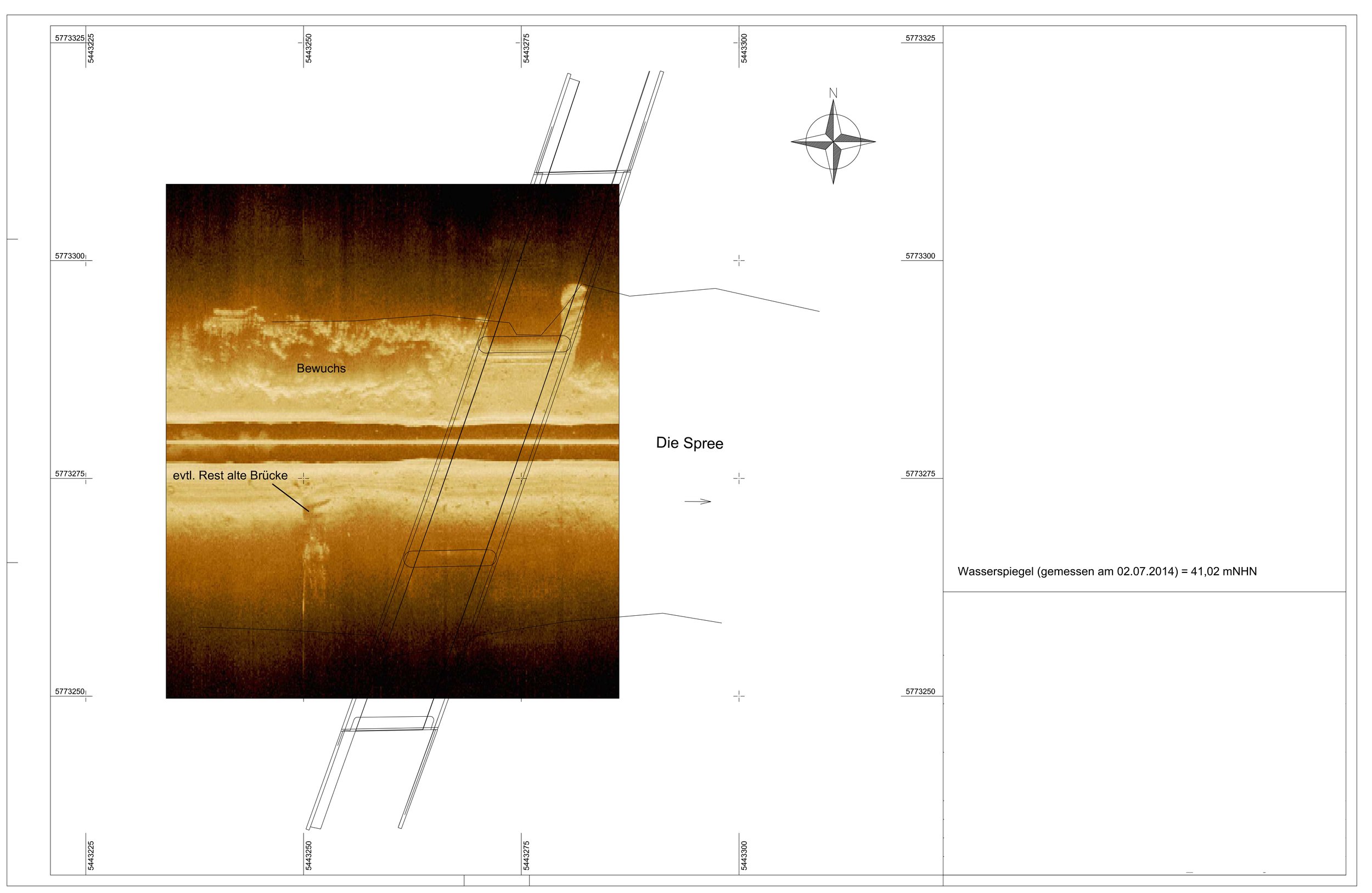
A scientific diagram showing a submerged bridge site with labels in German, including the terms 'Bewuchs' (vegetation), 'evtl. Rest alte Brücke' (possible remains of an old bridge), and 'Die Spree' (the river Spree). There are annotations regarding water mirror measurements and a compass rose indicating north.
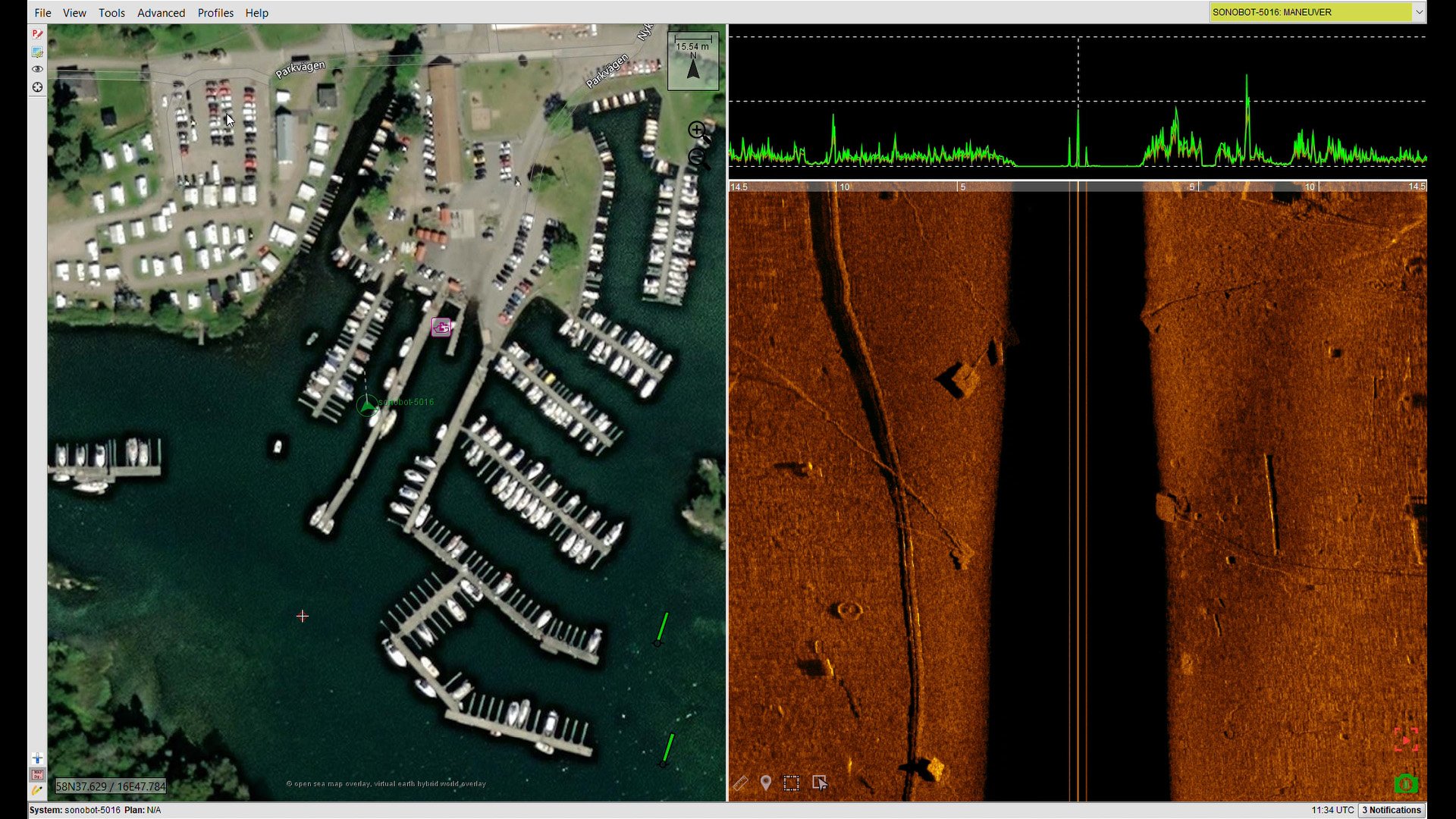
Satellite view of a marina with boats docked along piers, parking lots, and adjacent buildings, alongside a sonar imaging view showing heat signatures of the same area. SOnobot USV and Sidescansonar, BUVI Scandinavia
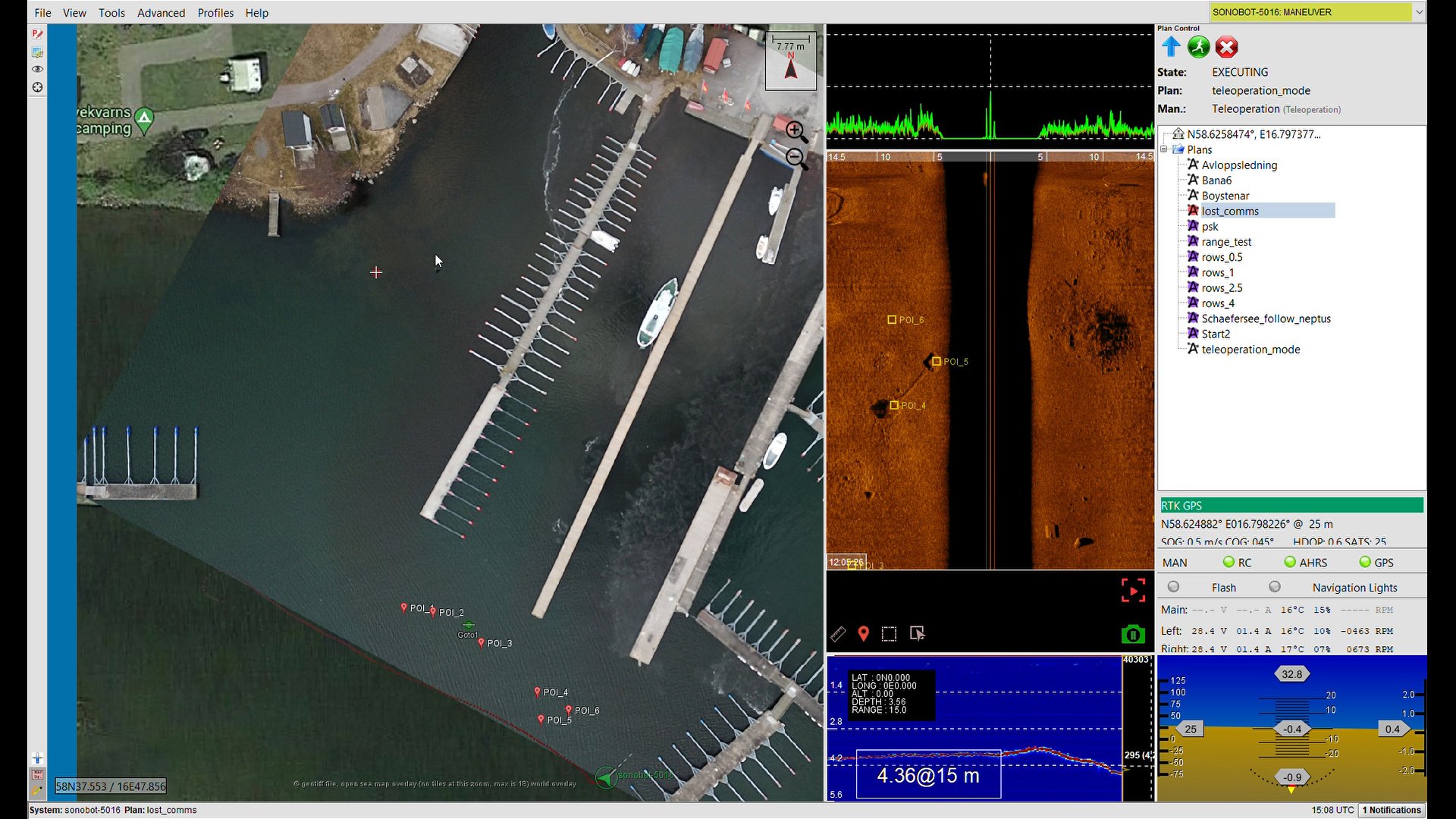
Aerial view of a marina with boats docked at piers, surrounded by water and adjacent land, with various measurement and monitoring data displayed on the screen.

Object recognition ·
Object recognition ·
Object recognition is an advanced feature for Sonobot USV and UUVs.
The AI-based system is an extra module that runs directly onboard the vehicle and analyses raw side-scan sonar or video camera output.
Videos Sonobot 5 USV
Discover how the Sonobot 5 USV performs in real‑world environments
Hyrdrographic Survey - Sonobot 5 & Sidescan Sonar
Versability
Under water mine search Sonobot USV feature object recognition
Object recognition Ai for Sonobot USV
Mapping riverbed under a bridge with Sonobot USV
Sonobot product description
Demo Sonobot 5
Object recognition Ai for Sonobot USV
Introducing the Sonobot 5 USV